
KW:CAN-bus iCAN 網(wǎng)絡(luò) 工程機(jī)械 控制網(wǎng)絡(luò) 汽車起重機(jī)
ORG:廣州周立功單片機(jī)發(fā)展有限公司,Guangzhou ZLG Mcu Development Co. LTD
Headline:
Application with iCAN System in Construction Machinery and Equipment
Abstract:
More Construction Machinery and Equipment have already implemented CAN-based control system. This article provides the basic theory and applications instances about the iCAN field-bus network; from technical point, the iCAN field-bus network can help the Construction Machinery and Equipment manufacturers to upgrade their products to the latest bus controlling technologies and the global standards, greatly increase their competitive in the global market.
[摘要]本文主要介紹CAN-bus 總線技術(shù)在工程機(jī)械中的應(yīng)用。重點(diǎn)以工程起重機(jī)為例,介紹基于CAN-bus 總線的iCAN 網(wǎng)絡(luò)及其在工程機(jī)車控制網(wǎng)絡(luò)中快速應(yīng)用的方法。
現(xiàn)場總線iCAN 網(wǎng)絡(luò)在工程機(jī)械中的應(yīng)用
廣州周立功單片機(jī)發(fā)展有限公司
一.CAN-bus 總線簡介:
CAN-bus 總線是國際上應(yīng)用最廣泛的現(xiàn)場總線之一,最初被設(shè)計(jì)用作汽車電子控制單元(ECU:Electric Control Unit)的串行數(shù)據(jù)傳輸網(wǎng)絡(luò),現(xiàn)已被廣泛應(yīng)用于歐洲的中高檔汽車中。近幾年來,由于CAN-bus 總線極高的可靠性、實(shí)時(shí)性,CAN-bus 總線開始進(jìn)入中國各個(gè)行業(yè)的數(shù)據(jù)通訊應(yīng)用,并在2002 年被確定為電力通訊產(chǎn)品領(lǐng)域的國家標(biāo)準(zhǔn)。
CAN-bus 網(wǎng)絡(luò)使用普通雙絞線作為傳輸介質(zhì),采用直線拓?fù)浣Y(jié)構(gòu),單條網(wǎng)絡(luò)線路可以連接到110 個(gè)節(jié)點(diǎn)。當(dāng)通訊距離不大于40 米時(shí),傳輸速率可達(dá)到1Mbps;當(dāng)使用5Kbps 傳輸速率(收發(fā)器PCA82C250/251 支持),同一物理網(wǎng)絡(luò)可達(dá)10 公里的通訊距離。
CAN-bus 總線的適用范圍:可適用于節(jié)點(diǎn)數(shù)目比較多,傳輸距離在10 公里以內(nèi),安全性、可靠性要求高的場合;也可適用于對(duì)實(shí)時(shí)性、安全性要求十分嚴(yán)格的機(jī)械控制網(wǎng)絡(luò)。
目前,國內(nèi)的汽車、電梯行業(yè)已是CAN-bus 應(yīng)用的典型領(lǐng)域,工業(yè)控制、智能樓宇、煤礦設(shè)備等行業(yè)也得到了廣泛的應(yīng)用。
二.CAN-bus 總線在工程機(jī)械中的應(yīng)用
由于嵌入式電腦、網(wǎng)絡(luò)通訊、微處理器、自動(dòng)控制等先進(jìn)技術(shù)的日漸廣泛應(yīng)用,工程機(jī)械控制系統(tǒng)的性能和集成度已經(jīng)有了很大的提高。而CAN- bus 總線由于良好性能,特別適合于工程機(jī)械中各電子單元之間的互連通訊。隨著CAN-bus 總線技術(shù)的引入,工程機(jī)械中基于CAN-bus 總線的分布式控制系統(tǒng)取代原有的集中式控制系統(tǒng),傳統(tǒng)的復(fù)雜的線束被CAN-bus 總線所代替:系統(tǒng)中各種控制器、執(zhí)行器以及傳感器之間通過CAN- bus 總線連接,線纜少、易敷設(shè),實(shí)現(xiàn)成本低,而且系統(tǒng)設(shè)計(jì)更加靈活,信號(hào)傳輸可靠性高,抗干擾能力強(qiáng)。
目前CAN-bus 總線技術(shù)在工程機(jī)械上的應(yīng)用越來越普遍。國際上一些著名的工程機(jī)械大公司如CAT、VOLVO、利勃海爾等都在自己的產(chǎn)品上廣泛采用CAN-bus 總線技術(shù),大大提高了整機(jī)的可靠性、可檢測(cè)和可維修性,同時(shí)提高了智能化水平。而在國內(nèi),CAN-bus總線控制系統(tǒng)也開始在工程汽車的控制系統(tǒng)中廣泛應(yīng)用,在工程機(jī)械行業(yè)中也正在逐步推廣應(yīng)用。
三. iCAN 網(wǎng)絡(luò)在工程機(jī)械中的應(yīng)用
1.iCAN 網(wǎng)絡(luò)的介紹
iCAN 協(xié)議即“Industry CAN-bus Application Protocol”,是現(xiàn)場總線CAN-bus 的應(yīng)用層協(xié)議之一,具有理解簡單、易于實(shí)現(xiàn)、實(shí)時(shí)可靠的特點(diǎn)。iCAN 網(wǎng)絡(luò)是面向于自動(dòng)控制領(lǐng)域、基于CAN-bus 總線和iCAN 協(xié)議的控制系統(tǒng)。該系統(tǒng)的目標(biāo)就是解決用戶在CAN-bus 應(yīng)用領(lǐng)域中的通訊控制或者數(shù)據(jù)采集問題。
將CAN-bus 網(wǎng)絡(luò)的數(shù)據(jù)鏈路層、物理層與一個(gè)高效的用戶層結(jié)合在一起,既可以保障底層使用CAN-bus 總線的高效、實(shí)時(shí)、可靠的特點(diǎn),又能夠建立一個(gè)易于實(shí)現(xiàn)、成本較低、效率良好的數(shù)據(jù)通訊網(wǎng)絡(luò)方案。這就形成了一個(gè)基于現(xiàn)場總線CAN-bus 的完整通訊網(wǎng)絡(luò)以及數(shù)據(jù)采集方案,也就是 iCAN 網(wǎng)絡(luò)的誕生。
iCAN 網(wǎng)絡(luò)構(gòu)建非常靈活,結(jié)構(gòu)簡單,成本較低;并且iCAN 網(wǎng)絡(luò)具有易于組態(tài),安裝、運(yùn)行、維護(hù)簡便的特點(diǎn)。iCAN 網(wǎng)絡(luò)組成結(jié)構(gòu)如下圖所示,包括了iCAN 模塊、CAN-bus 接口卡以及CAN-bus 網(wǎng)關(guān)/網(wǎng)橋設(shè)備。
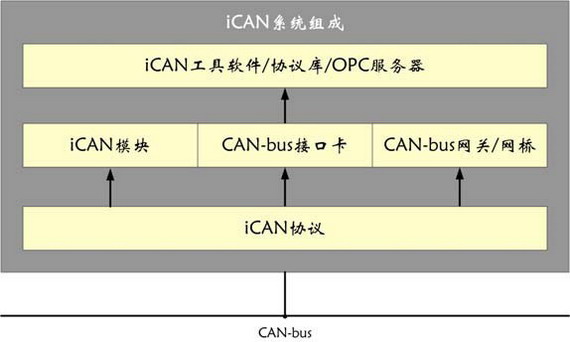
圖 1 iCAN 網(wǎng)絡(luò)的組成
iCAN 網(wǎng)絡(luò)的基礎(chǔ)與核心是iCAN 協(xié)議。iCAN 協(xié)議是國內(nèi)對(duì)于CAN-bus 系統(tǒng)應(yīng)用的一種全新嘗試。iCAN 協(xié)議的設(shè)計(jì)目標(biāo)是:實(shí)現(xiàn)一種簡單/可靠/穩(wěn)定的CAN-bus 應(yīng)用層協(xié)議。在iCAN 協(xié)議的設(shè)計(jì)過程中,充分參考和借鑒了DeviceNet 協(xié)議和CANopen 協(xié)議。畢竟DeviceNet 協(xié)議和CANopen 協(xié)議是嚴(yán)謹(jǐn)和完善的,并經(jīng)過實(shí)際工程驗(yàn)證。
制定iCAN 協(xié)議是一個(gè)相當(dāng)嚴(yán)謹(jǐn)?shù)脑O(shè)計(jì)過程。這里主要考慮了一些關(guān)鍵因素:
●CAN 報(bào)文的分配
●數(shù)據(jù)通訊的實(shí)現(xiàn)
●網(wǎng)絡(luò)管理
●設(shè)備建模
通過以上技術(shù)問題的解決,一方面可以保證iCAN 網(wǎng)絡(luò)的高通訊效率、高數(shù)據(jù)可靠性,令基于iCAN 協(xié)議的各個(gè)總線節(jié)點(diǎn)能夠組成一個(gè)有機(jī)的整體網(wǎng)絡(luò);另一方面,通過在iCAN協(xié)議設(shè)備建模方面的嘗試,可以使產(chǎn)品描述標(biāo)準(zhǔn)化,協(xié)議發(fā)展具有可延續(xù)性,保障后續(xù)產(chǎn)品開發(fā)過程中在通訊協(xié)議方面的的一致性。
在iCAN 網(wǎng)絡(luò)中,可以根據(jù)需要增加CAN-bus 網(wǎng)關(guān)/網(wǎng)橋設(shè)備,以適應(yīng)實(shí)際系統(tǒng)的網(wǎng)絡(luò)規(guī)模和通訊距離,以及用戶終端設(shè)備在安裝、布線等方面的要求。通過CAN-bus 網(wǎng)關(guān)/網(wǎng)橋設(shè)備,iCAN 網(wǎng)絡(luò)也可以方便地互連其它類型的網(wǎng)絡(luò),比如串行通訊網(wǎng)絡(luò)RS-232/RS-485、以太網(wǎng) EtherNet 等,或者連接DeviceNet/CANopen 網(wǎng)絡(luò)。
2.工程機(jī)械中iCAN 網(wǎng)絡(luò)結(jié)構(gòu)
在工程機(jī)械中iCAN網(wǎng)絡(luò)主要由工控微機(jī)、標(biāo)準(zhǔn)PC-CAN接口卡以及iCAN模塊組成,系統(tǒng)結(jié)構(gòu)如圖 2 所示。
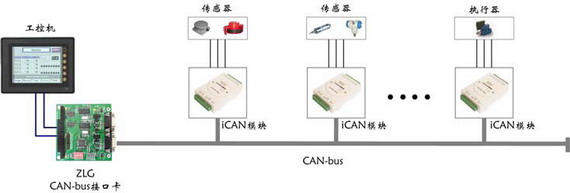
圖 2 工程機(jī)械中iCAN 網(wǎng)絡(luò)的結(jié)構(gòu)
工控微機(jī)通過CAN-bus 接口卡接入CAN-bus 網(wǎng)絡(luò)中,與總線進(jìn)行數(shù)據(jù)交換,管理系統(tǒng)中各個(gè)iCAN 模塊及其它設(shè)備;實(shí)現(xiàn)系統(tǒng)中各設(shè)備參數(shù)監(jiān)控、顯示、人機(jī)界面以及各種控制功能。iCAN 模塊實(shí)現(xiàn)傳感器的信號(hào)采集,并實(shí)現(xiàn)控制信號(hào)輸出功能。
根據(jù)工程機(jī)械中的傳感器、控制器類型的不同,選擇合適的iCAN 模塊。iCAN 模塊的輸入端口采集液壓、發(fā)動(dòng)機(jī)等系統(tǒng)中傳感器的信號(hào),并傳送到總線上;輸出端口根據(jù)來自總線上的控制信息操作執(zhí)行機(jī)構(gòu),完成對(duì)于液壓等系統(tǒng)的控制。
iCAN 網(wǎng)絡(luò)在工程機(jī)械中的應(yīng)用,避免了復(fù)雜的信號(hào)連線,使控制系統(tǒng)的安裝為何簡單,運(yùn)行可靠,應(yīng)用靈活,并能夠保證控制的實(shí)時(shí)性。
四.應(yīng)用實(shí)例:起重力矩限制系統(tǒng)
1.簡介
起重力矩限制系統(tǒng)為汽車起重機(jī)控制系統(tǒng)中一個(gè)重要組成部分。該系統(tǒng)通過對(duì)起重機(jī)械中長度傳感器、角度傳感器以及壓力傳感器等輸出數(shù)據(jù)進(jìn)行分析處理,實(shí)現(xiàn)對(duì)系統(tǒng)工作時(shí)起重力矩的實(shí)時(shí)監(jiān)控,以保證起重機(jī)工作在安全狀態(tài)下。而且該系統(tǒng)能夠?qū)崟r(shí)記錄起重機(jī)作業(yè)中的危險(xiǎn)工況,為事故的分析處理提供可靠的依據(jù)。
該系統(tǒng)要求能夠?qū)崟r(shí)采集長度傳感器、角度傳感器以及壓力傳感器的輸出數(shù)據(jù),其中長度傳感器、角度傳感器以及壓力傳感器的信號(hào)輸出類型主要為電壓或者電流信號(hào),傳感器信號(hào)的通道共有4 路。此外系統(tǒng)要求提供4 路數(shù)字量輸出通道。
2.解決方案
起重力矩限制系統(tǒng)的CAN-bus解決方案為:系統(tǒng)采用一塊PC104-CAN2I雙路CAN接口卡、一個(gè)iCAN-4017 模擬量輸入模塊以及一個(gè)iCAN-4050 數(shù)字量輸入輸出模塊。起重力矩限制系統(tǒng)結(jié)構(gòu)示意圖如下圖 3 所示:
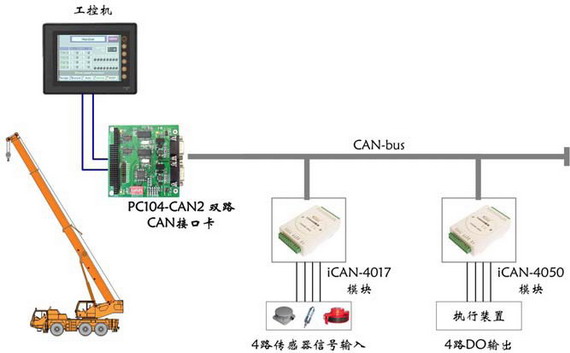
圖 3 起重力矩限制系統(tǒng)原理圖
1)PC104-CAN2I 雙路CAN 接口卡作為CAN 網(wǎng)絡(luò)主控設(shè)備,實(shí)現(xiàn)對(duì)于數(shù)據(jù)采集模塊的管理。PC104-CAN2I 接口卡配備 2 個(gè)通道CAN 接口, CAN 通道采用光電隔離措施,增強(qiáng)了系統(tǒng)在惡劣環(huán)境中使用的可靠性。電路板采用4 層板技術(shù),SMT 工藝,抗干擾能力強(qiáng),保障長期運(yùn)行的穩(wěn)定可靠。
2)iCAN-4017 模擬量輸入模塊主要技術(shù)參數(shù)如下:
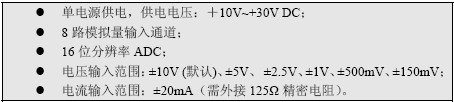
采用iCAN-4017 模擬量輸入模塊的四路輸入通道用于采集系統(tǒng)中長度傳感器、角度傳感器以及壓力傳感器的輸出數(shù)據(jù)。
3)iCAN-4050 數(shù)字量輸入輸出模塊主要技術(shù)參數(shù)如下:
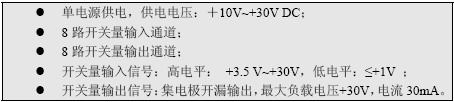
采用iCAN-4050 數(shù)字量輸入輸出模塊四路輸出通道用于提供數(shù)字量輸出信號(hào)。
3.系統(tǒng)說明
起重力矩限制系統(tǒng)通過iCAN 模塊檢測(cè)各傳感器的信號(hào),各模塊通過CAN 總線將傳感器數(shù)據(jù)傳送到控制主機(jī)進(jìn)行處理,系統(tǒng)工作狀態(tài)實(shí)時(shí)顯示在人機(jī)界面上。該系統(tǒng)能夠警示危險(xiǎn)工況,診斷并排除故障。在危險(xiǎn)工況下,通過實(shí)時(shí)地控制輸出模塊,使系統(tǒng)處于安全狀態(tài),防止事故的發(fā)生。
起重力矩限制系統(tǒng)軟件采用VC++開發(fā)。系統(tǒng)軟件對(duì)傳感器數(shù)據(jù)進(jìn)行處理,實(shí)時(shí)獲取系統(tǒng)工作狀態(tài),并以圖形化的界面顯示,在危險(xiǎn)狀態(tài)下及時(shí)發(fā)出報(bào)警信息,并可以根據(jù)鍵盤指令進(jìn)行相應(yīng)的控制。
在起重力矩限制系統(tǒng)中采用了iCAN-4017 模塊以及iCAN-4050 模塊各一個(gè)。在滿足系統(tǒng)需求的基礎(chǔ)之上,模擬量輸入、數(shù)字量輸入以及開關(guān)量輸出均有剩余通道,可以方便未來產(chǎn)品功能的擴(kuò)展。
該起重力矩限制系統(tǒng)的特點(diǎn)是:通過CAN-bus 總線實(shí)現(xiàn)對(duì)各傳感器信號(hào)的采集以及輸出裝置的控制,使得系統(tǒng)十分容易構(gòu)建,布線安裝十分方便;同時(shí)系統(tǒng)抗干擾能力強(qiáng)、可靠性高、實(shí)時(shí)響應(yīng)性好。而且通過CAN-bus 總線的應(yīng)用,使該起重力矩限制系統(tǒng)的很容易作為一個(gè)子系統(tǒng)嵌入到起重機(jī)的控制系統(tǒng)中。
通過實(shí)際的運(yùn)行測(cè)試表明,該系統(tǒng)運(yùn)行穩(wěn)定、可靠,維護(hù)接口方便,性能價(jià)格比較高。
五.結(jié)論
CAN-bus 總線的應(yīng)用使工程機(jī)械控制系統(tǒng)功能具有良好的可擴(kuò)展性,易于實(shí)現(xiàn)對(duì)各分系統(tǒng)得集中監(jiān)測(cè)和管理。此外CAN-bus 總線的應(yīng)用使用戶的使用、維護(hù)、故障診斷更加靈活和方便,例如起重機(jī)在出廠調(diào)試時(shí),工廠計(jì)算機(jī)系統(tǒng)可以通過CAN-bus 總線訪問其控制系統(tǒng),記錄保存調(diào)試數(shù)據(jù),以作為在故障時(shí)維修的原始參考數(shù)據(jù)。
隨著CAN-bus 總線在工程機(jī)械中的不斷應(yīng)用,必將大大提高工程機(jī)械的可靠性、可檢測(cè)、可維修性以及智能化水平。
依靠強(qiáng)大的專業(yè)開發(fā)團(tuán)隊(duì)、NXP 半導(dǎo)體的領(lǐng)先技術(shù),我們始終執(zhí)著于工程機(jī)械行業(yè)中CAN-bus 總線的應(yīng)用推廣,為客戶提供更多的優(yōu)質(zhì)的解決方案。