
O 引言
雷達偵察設備由于要對從幾百兆赫至幾十吉赫的頻段進行偵察接收,為了保證天線的電氣特性,同時便于跟蹤不同波段的多個目標,往往采用多部天線。以往對天線的控制多采用相互獨立的方式,每一部天線有對應的一套控制系統,其結果不僅是設備量大,故障率高,而且操作起來也不方便。為了簡化對多部天線的控制,可以利用CAN總線的優勢。CAN(Controller Area Network)總線為多主總線,具有點對點,一點對多點通信的功能,它采用非破壞性總線仲裁技術,可以根據總線上不同節點的優先級高(低)安排數據的傳輸次序,節省了總線仲裁時間,通信距離最遠可達10 km(5 Kb/s),通訊速率最高可達1 Mb/s(40 m)。此外,CAN協議能夠對通信數據進行編碼,使得網絡內的實際節點數可達100個以上。某雷達偵察設備中共有六部天線,對應于六個不同的波段,每部天線作為一個節點,操作臺作為上位節點,通過設計靈活地控制軟件,完成對各天線掃描方式、掃描速度及掃描范圍的設定及PID控制。
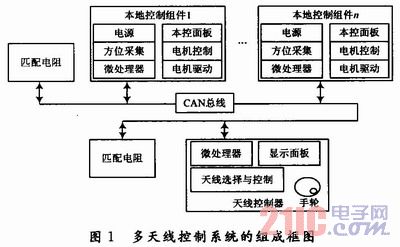
1 CAN總線多夫線控制系統的組成
多天線控制系統由本地控制組件、CAN總線和天線控制器組成,如圖1所示。其中本地控制組件包括本控面板、電源、微處理器和電機驅動電路,負責天線的位置信息采集和電機控制算法的實現;CAN總線采用CAN 2.0B標準協議進行數據傳輸,接口芯片采用SJA1000,完成物理鏈路層和數據鏈路層兩層功能;天線控制器包括顯示面板、控制按鍵、手輪、微處理器等,用于接收用戶操作指令,顯示指定天線的狀態和控制天線的運動方式。
在由CAN總線構成的天線控制系統中,天線控制器和本地控制組件各分配一個固定的CAN網絡地址,天線控制器通過面板選擇所要控制的天線編號,將該天線的工作方式(扇掃、環掃、手動)、工作參數(扇掃邊界、掃描速度)等發送到所選天線的本地控制組件,再由本地控制組件根據天線控制器給出的控制算法,實現對天線的控制,并將天線的當前參數(方位、轉速、轉向)通過CAN總線傳送到天線控制器上顯示。手動方式時,所選天線的本地控制組件根據天線控制器手輪的控制信息和跟隨算法,實現對天線的手動位置控制。
2 方位傳感器的數字化設計
在對天線位置信息的采集中,方位傳感器采用同步機電路實現。其中,定子線圈加入工頻激磁電壓,轉子的三相電壓幅度受定子與轉子相對角度的調制,三個轉子線圈之間相互間隔120°放置。在模擬信號傳輸中,同步接收機會根據三相電壓幅度的變化跟隨同步機做同步旋轉,達到傳輸角度信號之目的。為了便于與微處理器的連接,輸出的方位信號還必須做數字化處理。
設同步機定子加激磁電壓Vo=Vmsinωt,三個轉子線圈的電壓方程為:
式中:K為轉子繞組與定子繞組的變壓比;θ為轉子相對于定子的轉角;ω為工頻激磁電壓的角頻率。
由此可知,在激磁電壓正峰值時,對三個電壓取值,則V1,V2,V3與轉角θ的關系為:
將轉角θ從0~360°劃分為12個區間,每個區間30°,則可將同步機三相電壓幅度隨轉子角度變化的曲線繪制如圖2所示。
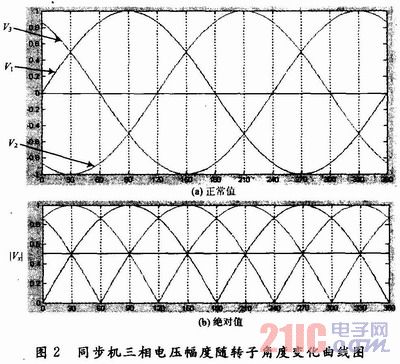
如果用V1-V2,V2-V3,V3-V1以及V1,V2,V3中絕對值最小的信號Vx的極性來表示這12個區間,則很容易得到各區間的二進制代碼,如表1所示。例如:當θ角在0~30°時,V1-V2為正,V2-V3為負,V3-V1為正,而此時V1的絕對值最小,即Vx=V1,其值為正,則該區間可以用(10 11)B表示。
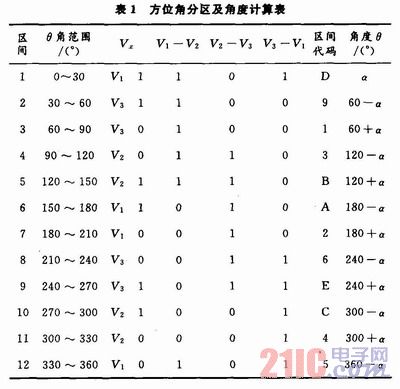
進一步,對此時的Vx信號做歸一化處理后再進行反正弦運算,其結果是單調的,且計算出的角度值α介于0~30°之間。根據θ角所在的區間,就可求出當前天線的方位。
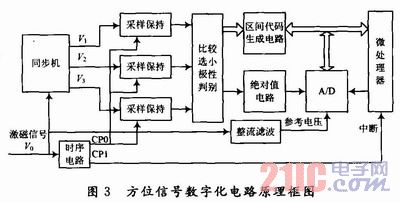
根據以上分析,可以將方位信號數字化過程簡述如下:在激磁工頻信號的正峰值點生成采樣脈沖信號CP0和微處理器中斷信號CP1,控制三路采樣保持電路同時對分壓后的同步機三相電壓進行采樣保持,選擇絕對值最小的一路信號送A/D轉換器,同時判斷其正負;區間代碼生成電路根據對三路采樣信號的比較和最小信號的正負,確定θ角所處區間的代碼;微處理器響應中斷,啟動A/D轉換,求得α值,同時讀取θ角所處區間代碼,根據表1給出的區間計算公式,確定θ角的具體數值送本地面板顯示,并通過CAN總線上傳天線控制器。
方位數字化電路原理框圖如圖3所示。
從圖2可以看出,在0~30°區間內正弦曲線可近似為線性區間,為進一步提高精度,可以按照正弦函數曲線對A/D轉換進行補償,以滿足精確測量的需要。同時,為避免因激磁電壓的波動引起A/D轉換后的數值在區間之間的跳動,A/D轉換器的參考電壓應與激磁電壓的幅度按比例浮動。
3 位置隨動旋轉編碼器接口設計
旋轉編碼器是隨動控制中常用的接口部件,這里選用增量式旋轉編碼器,它由涂有莫爾條紋的編碼盤和光電檢測裝置構成,編碼盤上涂有兩道相差90°的黑白相間隔柵,分別稱之為A道和B道。工作時,光電檢測器發出可見光照射在編碼盤上,當編碼盤旋轉時,光發射管裝置照過隔柵,光敏接收管便會產生通(斷)的脈沖輸出信號。由于A,B道相位差為90°,因此其輸出脈沖也有90°的相差。當旋轉編碼器正轉時,A信號超前B信號90°;反轉時,B信號超前A信號90°。
如果直接采樣A、B兩路信號,電路結構會比較復雜。為便于計算機處理,可將旋轉編碼器的A、B兩路信號進行適當變換,生成方向信號DIR和增量計數脈沖CLK。圖4給出了旋轉編碼器的接口電路以及相應的波形。為防止因機械轉動帶來的波形邊緣的抖動,接口電路的輸入應采用施密特型。
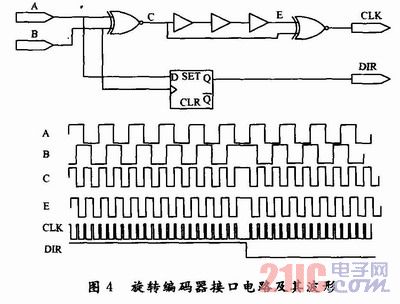
圖4中C點的方波周期是A或B信號周期的1/2。為了在手輪低速轉動時,防止由于A或B信號周期過大而影響計數器的正常工作,可將C點波形與經緩存器延遲后的波形E相異或,從而得到增量計數脈沖CLK,其周期應是C周期的1/2,即為A或B信號周期的1/4,實現A或B信號頻率的四倍頻細分。為便于計算機識別手輪的轉動方向,電路中增加了方向信號DIR,當旋轉編碼器正向轉動時,A信號超前B信號90°,此時DIR輸出為高電平;反之,DIR輸出為低電平。
4 天線的PID控制
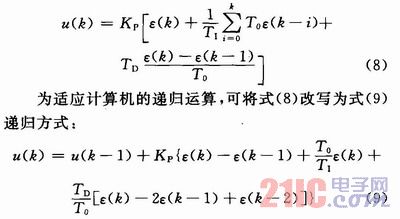
圖5給出了天線的PID控制原理。如圖5(a)所示,在連續控制系統中,PID的控制規律可以寫成如下形式:

式中:u(t)為PID控制器的輸出或稱為被控對象的控制輸入;ε(t)為偏差;Kp為比例系數;TI為積分時間常數;TD為微分時間常數。
為在數字系統中實現PID控制,需將連續PID控制規律離散成離散型PID控制規律,即用差分方程來表示:
天線的離散型PID控制方案如圖5(b)所示。在該方案中,天線的工作方式分為自動掃描和手動掃描兩種。自動掃描方式下,天線控制器選擇設定相應天線的掃描轉速。由于不同波段的天線尺寸不同,各個天線轉臺的轉動慣量也不盡相同,因此需要通過調整相應天線的比例積分和微分常數,來使天線的控制達到期望的特性。而在手動掃描時,天線控制器將手輪的轉動控制,經位置隨動旋轉編碼器變換為對天線的控制輸出,通過CAN總線實時傳遞給指定天線的本地控制組件,由本地控制組件中的PID控制算法實現對天線的手動控制,從而達到手動跟蹤目標之目的。
5 結語
CAN總線技術已在工業控制中得到廣泛應用。本系統采用CAN總線,結合天線方位的數字化接口設計,將分布式微處理器聯系起來,實現了多天線的數字化PID控制,簡化了天線控制系統的設計,保證了天線控制的精度與穩定性。