
1 引 言
全球定位系統( GPS)具有全球覆蓋、全天候、實時導航、導航定位誤差不隨時間積累等優點。但是,GPS衛星信號容易受到人為干擾;在高動態環境下,將產生較大的衛星信號跟蹤誤差, 不能滿足載體實時導航與制導要求。
慣性導航系統具有自主式、隱蔽性導航, 工作環境不受介質限制, 能提供豐富的導航信息, 以及導航數據輸出率高等優點。
由于GPS 與慣導均存在其自身難于克服的缺陷。因此, 在實際工程應用中, GPS /慣導組合導航系統設計和應用較為廣泛。如圖1所示。GPS與慣導組合后的優勢在于:
( 1)克服各自缺點, 取長補短, 組合導航精度高于兩個系統獨立工作的精度;( 2)提供利用GPS導航" title="GPS導航">GPS導航信息校正慣性傳感器的有效手段, 實現慣導系統在線校正;( 3)當載體機動或干擾使衛星信號失鎖時, 可以暫時由慣導系統提供導航數據;( 4)慣導系統提供連續寬帶的位置、速度和姿態估計比單獨使用GPS的結果平滑;( 5)利用慣導系統速度信息輔助GPS接收機跟蹤環, 可以增大等效噪聲帶寬, 既保證在高動態環境下對衛星信號的穩定跟蹤, 又提高接收機的抗干擾性能;( 6)組合系統有利于GPS衛星信號的完整性監測, 增強系統可靠性能和容錯能力;( 7)對于GPS 載波相位測量, 慣導系統提供的信息有利于GPS衛星整周模糊度參量的快速解算,可以很好地解決周跳探測與修復問題, 并且降低至少4顆衛星同步可觀測的要求;( 8)采用中、低精度的慣性儀表與GPS OEM 板集成, 不僅技術上容易實現, 滿足實際應用的精度要求, 而且設備研制成本低, 可以獲得較好的經濟效益。
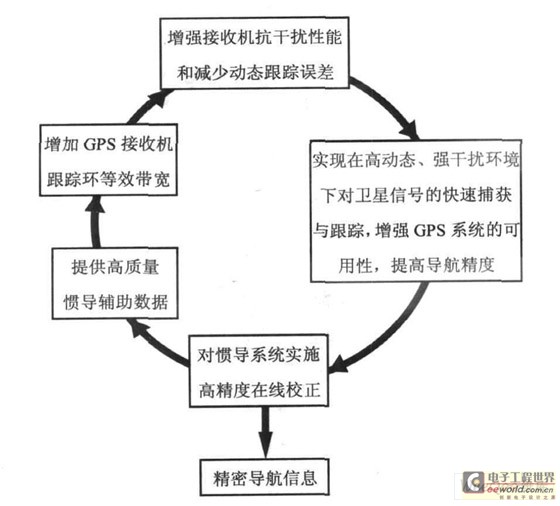
圖1 GPS /慣導組合導航系統的互補性
2 GPS /慣導組合模式
依據不同的分類標準, GPS 與慣導系統有多種組合形式, 但其本質都是一致的。其中較為先進的是利用偽距和偽距率信息的緊耦合組合模式。如圖2所示, 緊耦合模式的優點在于:
( 1) GPS與慣導系統集成, 實現硬件一體化, 導航計算精度高, 實際應用更為有效。
( 2)不需要同時跟蹤4 顆以上的衛星, 才能進行組合導航計算。
( 3)使用一個卡爾曼濾波器, 當GPS 不能正常工作時, 慣導系統暫時提供導航參數。
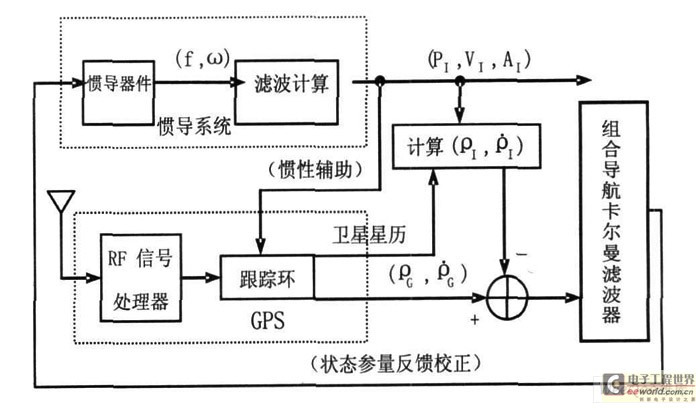
圖2 GPS /慣導緊耦合模式原理框圖
3 緊耦合GPS /慣導組合系統硬件設計
GPS /慣導緊耦合系統硬件可以分為五個部分,其結構如圖3所示。
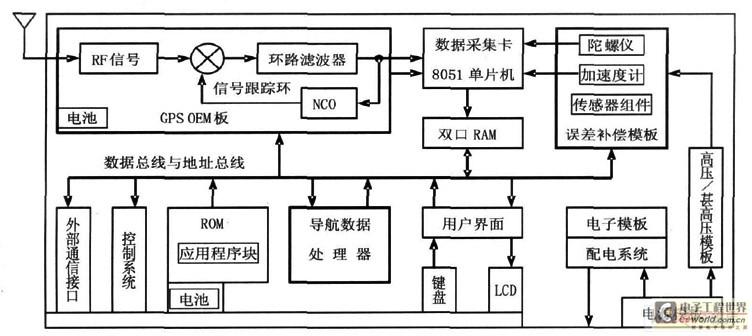
圖3 緊耦合GPS /S INS系統硬件組織設計圖
( 1)數據采集部分, 由GPS接收天線、GPS OEM板、陀螺儀、加速度計、數據采集卡和雙口RAM 組成。其中, 數據采集卡應具有不同的采樣頻率, 能夠同時采集模擬信號和數字信號, 由8051單片機加上一些外圍芯片組成的數據采集卡;也可以使用專用的GPS+ 慣導系統數據采集卡, 如TMS320C25數據采集卡。在GPS、慣導系統與導航數據處理器( CPU )之間的數據傳輸可以利用雙口RAM, 以實現數據的快速存取。
( 2)導航數據處理部分, 采用單片機(如80196單片機或8086 /8087單片機) , 通過總線從ROM 中將應用程序調入導航處理器( CPU )進行數據處理,處理結果再次放回總線, 對慣性測量器件進行誤差補償、輔助GPS OEM 板的信號跟蹤環路、顯示導航信息、傳輸到控制系統和外部通信接口等。此外, 還負責系統部件的協調與管理, 維護系統的正常運行。
( 3)用戶界面部分是人機對話的工作平臺, 由液晶顯示器和輸入鍵盤組成, 顯示導航信息, 對導航系統進行人工干預。
( 4)電源部分, 由電源模板、電子模板、高壓甚高壓模板和配電系統構成, 為GPS OEM 板、慣導系統、數據采集卡、以及導航數據處理器等提供各種標準電源支持。
( 5)通信接口部分包括系統內部元件接口通信和系統與外部接口通信, 前者采用M IL STD1553總線;后者將外部測量數據傳入系統, 如氣壓測高數據、雷達測量數據等, 以對系統進行校正或多系統組合導航, 也可以將系統內部數據傳輸到其它設備。
4 緊耦合GPS /慣導組合系統軟件設計
GPS /慣導組合導航系統設備包括8 個軟件功能模塊, 各個功能模塊之間的連接如圖4所示:
( 1)系統啟動與自檢模塊, 負責系統設備開啟,檢測設備部件的運行狀況, 對異常情況及時報警, 提示工作人員給予相應的指示操作。
( 2)系統管理模塊, 負責系統設備的協調、管理、數據存儲與清理工作。
( 3)系統初始化模塊, 使用GPS 進行快速定位和姿態測定, 實現慣導系統的初始對準。
( 4)數字信號處理模塊, 負責GPS接收機的數字信號處理。
( 5)數據采集模塊, 負責GPS、慣導系統基本觀測量的數據提取, A /D轉換等工作。
( 6)數據傳輸模塊, 將GPS、慣導基本觀測量的數據傳輸到CPU, 進行導航數據處理, 將最終導航信息傳輸到導航顯示設備和控制系統等。
( 7)導航數據處理模塊, 負責各種導航算法的實現。
( 8)用戶界面模塊, 提供用戶界面, 具有顯示導航信息、數據查詢和錯誤提示等功能。

圖4 GPS /慣導組合導航系統軟件模塊化實現框圖
5 結束語
基于微處理器強大的計算和通信能力, 解決對主被動導航的多傳感器數據融合問題, 克服了GPS導航機動性能差、衛星信號失鎖、慣導系統誤差隨時間漂移的主要缺點, 取長補短。使組合導航系統既增大了等效噪聲帶寬, 保證在高動態環境下對衛星信號的穩定跟蹤, 又提高了接收機的抗干擾性能、系統可靠性能和容錯性能, 從而輸出平滑連續的導航信息。