

第一次管道中的現場測試
作者:
Ricardo Artigas Langer - EngeMOVI
行業:
能源/電力, 石油與天然氣/ 煉油/ 化工
產品:
實時模塊, FPGA模塊, LabVIEW, cRIO-9014
挑戰:
尋找石油或者天然氣管道的參考位置,并確保空間誤差小于1米
解決方案:
通過使用LabVIEW實時模塊和NI CompactRIO,設計和實現一個實時數據采集和處理系統,以管理在石油或者天然氣管道內部通行的慣性導航系統(INS)的數據。系統實現了對數據的采集、預處理和儲存,還可以利用LabVIEW對數據進行后處理,以獲得最終結果。
"借助于LabVIEW,我們很容易實現對PIG(檢管器)的編程,以滿足任務要求。并且,我們還使用了相同的程序設計語言開發一個后處理程序,以便轉換采集的大多數數據。"

PIG(檢管器)是一個用于石油和天然氣管道檢驗的工具,它插入管道中并且借助于關內液體流動產生的壓力前進。PIG可以檢驗管道的變形和異常腐蝕情況,有助于排查可能造成生態事故的故障。為了降低成本并且在監測到異常情況后盡快更換管道,我們必須要知道異常現象的參考位置。慣性PIG被設計用于檢測由地形運動產生的管道移位。
由于慣性PIG在地面以下運行,被管道所屏蔽,我們不可能獲得連續的GPS信號。所以慣性PIG必須使用INS(慣性導航系統)來測量加速度和角速度,并通過綜合的數據分析,獲得儀器的速度、位置和方向。然而,由系統中還夾雜了由偏移和噪音等因素造成的傳感器不精確的問題,隨著時間的推移,定位準確度會下降。
一種避免偏移的有效方式是添加輔助測量。我們使用里程表和一些沿管道的GPS參考導航點,以便及時更新定位的位置。這些GPS標記借助于管道外的傳感器采集到PIG通過的瞬間,并與檢管器的慣性導航系統同步。GPS和INS的結合的測量方式被稱作GPS輔助慣性導航。這種結構允許根據用于動態系統的迭代狀態估計法(卡爾曼濾波器Kalman Filter)進行軌跡的尋跡和登記。雖然設置更多GPS點可以減少系統誤差,但是這需要技術團隊花費更多的準備時間。因此,我們選擇了更節省成本的方案。
執行慣性PIG任務的計算機必須滿足一些要求,包括在啟動之前對現場所有傳感器進行復雜狀態檢查,以避免影響整個任務。它還必須在高采集頻率下,在60多個小時內持續實現對20多個傳感器的管理。由于系統對耐溫性要求高,并且必須能夠抵御超過20G的沖擊,還需要足夠的小以放置到PIG內部,所以目前沒有任何現成可用的硬盤可以在管道內存儲這些數據。因此,我們在PIG內實施了實時統計無損耗浮點數據壓縮法。
我們采用了一個帶有現場可編程門陣列(FPGA)的NI cRIO-9014控制器,它小巧靈活,抗振性好,并且功能強大,足以滿足PIG任務的苛刻要求。我們還使用了強大而易用的LabVIEW開發平臺進行編程。圖一中展示了慣性PIG的硬件架構。
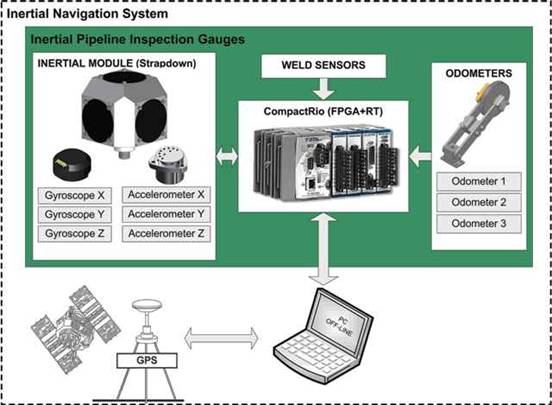
圖1 PIG硬件架構
借助于LabVIEW,我們很容易對PIG進行編程,以滿足任務要求,并且還開發一個后處理程序,以便把采集到的大量數據轉換成管道中焊接點的參考位置。CompactRIO的FTP和TCP功能可以簡化所有采集的數據的采集,還可以使用任何計算機或者PDA遠程配置任務參數。
通過對任務中計算機VI進行遠程訪問,我們可以很容易診斷原型機的可能故障。這就使團隊能夠集中精神于開發數學算法,而非通信協議,來進行數據融合和統計分析。最終,借助于LabVIEW對于多核的支持,這些算法在乘以經過慣性導航和卡爾曼濾波器的狀態空間估計的數千個矩陣之后,運行的更快。
項目開發僅用了18個時間,還包括了在完成機械設計之前所進行的一系列測試。因為我們設計的是能夠輸送液體而非固體的管道,我們必須實現一個復雜的懸浮系統,以保證INS的正常工作。檢管器計算不正確,在管道內會有很多因素會導致PIG被破壞,例如閥門、轉角、縫隙、限位器、液體流量,甚至是非法安裝的用于偷竊燃料的閥門。因此,硬件和軟件的開發必須與機械設計同時進行,以避免造成整個項目延遲的。
在開發過程中,我們需要一個平臺用于測試算法。我們在一輛自行車上安裝了CompactRIO控制器和傳感器(圖2),并且按照和在管道內使用PIG繪制路徑地圖一樣的方式來繪制路徑地圖。

圖2 使用自行車進行現場試驗
雖然我們從這個試驗平臺收集了許多數據,但是自行車比管道具有更多的自由度;因此最終我們用軌道小車(圖3)來代替自行車,它提供了一個更像最終真實運行條件的試驗平臺。

圖3 使用軌道小車進行現場試驗
最后,在裝配好PIG機械結構后,我們在管道上進行了現場試驗。之前所提到的每個現場試驗平臺都具有不同的特性,而LabVIEW可以快速適應于每個現場試驗平臺,以保證項目按時完成。我們利用NI的產品開發了所有軟件,而一段文本代碼都不用寫。
在巴西和哥倫比亞,在投入商業使用將近一年的時間里,CompactRIO控制器經受了各種苛刻的考驗。其中有一次,由于對接收程序的錯誤操作造成慣性PIG與管道底部正面相撞,撞擊力非常大,破環PIG小車間的聯軸器。這些由8毫米粗的鋼條制成聯軸器完全扭曲,并穿透了PIG外殼,到達了放置CompactRIO的位置。裂口使整個隔間都充滿40大氣壓的增壓汽油。雖然CompactRIO的數據采集卡被破環了,但是實時控制器在弄干并且清潔后仍然能夠運行,使得我們搶救回了40小時任務的數據。這意味著,即使PIG幾乎完全被破環,我們也能夠收回所有的檢測數據,而無需進行重復實驗。
EngeMOVI和NI工程師已經經過了多次合作,實現了各種不同的項目:包括慣性PIGs、幾何和磁性PIGs、用于深水管道檢查的水下機器人、具有冗余運動功能的焊接機器人以及最近由NI 9505運動控制模塊驅動的的機動PIG,這些合作獲得了非常積極的結果。
我們開發的首個慣性PIG可以在直徑為25.3~35.6厘米、長度為289.7英里的管道內行進。最大的可接受曲率是1.5D(D為管道直徑),在管道內部行進的最大速度是8米/秒。初始原型正在不斷被改進,并在其之上已經研制出完整的系列產品,我們深信NI提供的產品將會不斷地在我們的新產品開發上扮演重要角色。