
1 引 言
PID算法是單片機實際應用中普遍采用的控制方法, 在電力、機械、化工等行業中獲得廣泛應用。但是, PID算法并非完美無缺, 它也存在一些問題。
例如: PID 控制中的積分作用主要是用于消除穩態誤差(靜差) , 而在動態過程中過強的積分作用卻可能使系統的穩定性變壞, 主要表現在超調與積分飽和。當設定值作大幅度改變或者設定值與反饋值之差很大時往往出現太大的超調量或過渡時間長。
PID控制算法中, 積分控制用來消除系統的穩態誤差, 因為只要存在偏差, 它的積分所產生的信號總是用來消除穩態誤差的, 直到偏差為零, 積分的作用才停止。系統對積分項的要求是: 偏差大時積分作用應減弱甚至全無, 而偏差小時則應加強。這樣既保持了積分的作用, 又減少了超調量, 使得控制性能有較大的改進。基于這個思想, 作者結合實際工程項目, 在論述了數字PID基本原理的基礎上, 著重對積分項進行了研究分析。
實際工程項目是75KW 純電動汽車充電電源系統, 此充電電源的額定輸出為500V /150A。當電網電壓波動時, 充電電源輸出的電壓電流上下波動范圍在正負1% 以內, 其采用的是改進的PID 算法, 實驗證明, 對積分部分的優化處理效果顯著。
2 PID算法簡介
PID 控制技術是基于反饋的控制方法。反饋理論的要素包括三個部分: 測量、比較和執行。將所要控制的變量經過反饋電路得到的測量值與給定值相比較, 用它們之間的偏差E 進行比例( P)、積分( I)、微分( D )的計算, 所得結果U 作為執行器的輸入, 執行器的輸出調節控制對象, 進而實現對系統的控制。比例部分的作用可以減少穩態誤差, 提高系統的動態響應速度。
微分部分的作用, 實質上是和偏差的變化速度有關, 也就是微分作用跟偏差的變化率有關系。微分控制能夠預測偏差, 產生超前的校正作用, 因此,微分控制可以很好的改善動態性能。Td 為微分常數, Td 越大, 微分作用越強, 反之微分作用越弱。
積分作用可以消除系統的穩態誤差, 提高控制的穩態精度。Ti 為積分常數, T i 越大, 積分作用越弱, 反之則積分作用強。但是積分作用因產生負相移, 將使控制系統穩定裕度下降, 系統動態性能變差。當系統在強擾動作用下, 或給定輸入作階躍變化時, 系統輸出往往產生較大的超調和長時間的振蕩。
3 積分部分的優化處理
傳統數字位置式PID表達式如下:

在傳統的PID算法中, 積分常數K i 在整個調節過程中其值不變。但系統對積分的要求是: 偏差大時, 積分作用減弱或為零; 反之則加強。否則, 當偏差大時會產生超調, 甚至出現嚴重的積分飽和。針對這種情況, 有幾種積分部分的優化方法。
3. 1 分段積分
根據偏差大小改變積分增益值。把偏差|E |分成不同的區間, 每個區間對應一個增益常數k, 分段積分表達式如下所示:

上式中, 傳統積分項 變為
變為 ,即在累加積分前加上了增益系數k。k 取值情況如下:
,即在累加積分前加上了增益系數k。k 取值情況如下:

實際應用中, 可根據偏差|E |的大小分為更多的區間, k的取值也可根據實際情況確定。
3. 2 變速積分
分段積分相比傳統PID對控制效果有了顯著的提高, 但是分段積分也有自己的缺點。例如電池充電過程中電池總電壓變化比較緩慢, 積分系數k 取大了會產生超調, 甚至積分飽和, 取小了又遲遲不能消除靜差. 如果根據測量值和設定值的偏差變化, 設定不同的分段積分系數, 能在一定程度上改善過程的穩定性、響應速度和超調, 但所設置的分段積分系數人為經驗因素較多, 沒能很好地反映偏差的變化,會對系統性能指標產生一定的影響。
變速積分也是為了滿足系統對積分項的要求,既偏差大時積分作用應減弱甚至全無, 而在偏差小時則應加強。電池充電過程的總電壓變化比較緩慢, 積分系數取大了會產生超調, 甚至積分飽和, 取小了又遲遲不能消除靜差。針對這一問題, 在電動汽車充電電源中根據電壓的測量值和設定值的偏差大小, 改變PID算法中積分項的累加速度, 取得了顯著效果。
該充電電源系統采用的是位置式PID 算法, 其中原表達式中積分部分為:
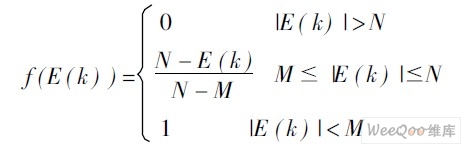
我們引入一個與偏差E ( k )有關的函數f (E( k) ), 使積分部分變為:

這樣, 當偏差|E |增大時, 積分部分的作用變小, 當偏差|E |變小時, 積分部分的作用變大, 而且這種變化跟|E |有關系, 能更好的適應系統狀況的變化。其中f (E ( k) )的表達式如下所式:
3. 3 非線性變速積分
變速積分基本消除了積分飽和現象, 同時大大減小了超調量, 容易使系統穩定。但對于在大范圍突然變化時產生的積分飽和現象仍不能很好地消除, 這時可采用非線性變速積分的PID 算法。非線性變速積分算法的思想是將PID 調節器輸出限定在有效的范圍內, 避免U ( k )超出執行機構動作范圍而產生飽和。程序的框圖如圖1所示。

圖1 非線性積分程序的框圖
4 基于非線性變速積分PID 算法的電動汽車充電電源
此75KW (額定輸出500V /150A )充電電源是專為純電動大巴設計的大功率充電機, 由一個充電機控制器和三個并聯充電模塊組成。充電模塊采用隔離型全橋式DC /DC 變換器作為主體結構。充電機控制器以單片機( 型號為MC9S12DT128)為核心。
MC9S12DT128有三路CAN, 其中CAN0 和CAN1都擴展成隔離的接口分別和充電模塊及車上的電池管理( BMS)通信。CAN0網絡負責充電機控制器控制充電模塊的啟停、往充電模塊發送電壓電流指令, 充電模塊往控制器發送電壓電流數據、故障(過流, 過壓, 過溫等)信息、當前狀態(停止、充電)等; CAN1網絡負責BMS控制充電機的啟停、往充電機發送充電電壓電流指令、發送當前電池的主要數據信息(單體電池最高電壓, SOC, 電池最高溫度等)。圖2為充電機-電動汽車網絡結構框圖。
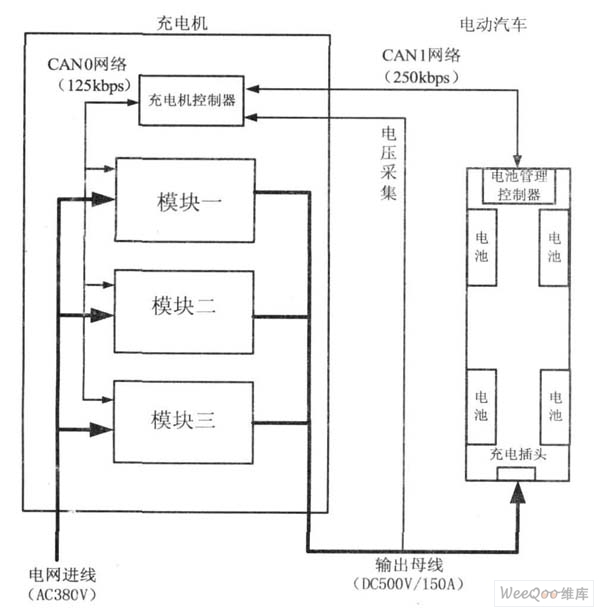
圖2 充電機-電動汽車網絡結構框圖
圖3 為基于非線性變速積分的充電電源原理圖。其控制思想如下: 采用電壓外環, 電流內環雙閉環控制方式。充電機控制器通過數字PID實現對電壓環的調節, 充電模塊通過模擬PID 實現對電流環的調節。限制電壓給定Vr 由控制器的按鍵板輸入,輸出電壓反饋Vf 由霍爾電壓傳感器HNV025A 采集輸出母線電壓后送入單片機的A /D口, 采樣時間為3. 3m s。充電機一旦啟動, 單片機就運行非線性變速積分PID 算法的子程序(采用中斷方式, 每3. 3ms中斷一次) , 之后得到充電機運行電流指令I’r, 再將I‘r 除以充電模塊的臺數n, 就得到每一個模塊的電流指令I’r。控制器通過CAN0 網絡將電流指令I’r以廣播方式發送充電模塊, 最終實現并聯模塊的均流。

圖3 基于非線性變速積分的充電電源原理圖
5 實驗結果
圖4為充電機從啟動到運行過程中(輸出為400V /120A )的電壓波形圖, 其中圖4 ( a) 采用傳統的PID 算法; 圖4( b)采用非線性變速積分PID 算法。可以看出, 圖4( a)由于啟動階段過程中積分飽和, 存在明顯的電壓尖峰(約為440V ), 超調量大(約為10% ) , 過渡時間長(約為8s) ; 圖4( b )避免了積分飽和, 幾乎沒有超調量, 且過渡時間較短(約為6s), 系統穩定性好。

( a)采用傳統的PID 電壓波形
( b )采用非線性變速積分電壓波形
圖4 充電機啟動階段輸出電壓波形。
6 結束語
分段積分, 變速積分, 非線性變速積分等優化方法相對于傳統PID 算法都有很大改進, 其中非線性變速積分更為完善, 它既有控制速度快、超調小、線性控制精度高等特點, 又有防止積分飽和的優勢, 有很強的實用性。