
GPS" title="GPS">GPS可提供連續、高精度、實時的時間基準、三維位置、三維速度、整周模糊度等數據,具有性能好、精度高的特點,因而廣泛應用于GPS載波相位測姿、精確制導、SINS/GPS組合導航、嵌入式車輛導航監控等軍事與民用領域。而嵌入式系統以其低功耗、小體積、高穩定性和便攜等優勢,在GPS的應用中占據重要的位置。本文研究基于ARM9" title="ARM9">ARM920T內核的嵌入式微處理器S3C2440和WindowsCE 5.0(簡稱WindowsCE)的某型軍車GPS定位信息的采集與處理。
1 系統硬/軟件平臺概述
車輛GPS定位信息采集系統的硬件平臺結構如圖l所示。
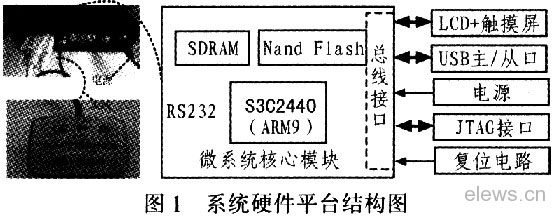
該平臺可以分為3大模塊:
1)微系統核心模塊 由基于ARM920T的32位嵌入式微處理器S3C2440、SDRAM和Nand Flash構成和總線接口構成。2片32 MB的HY57V561620構成64 MB的SDRAM存儲器,用于運行系統主程序。存儲容量為64 M×8 bit的Nand FlashK9F1208UOM,因其具有掉點保護功能,用于存儲操作系統內核、Bootloader的啟動代碼和用戶程序。
2)GPS原始數據接收模塊 由一臺遵循NMEA-0183協議標準的GPS接收機和PS天線組成。通過外接GPS接收機,將接收到的GPS原始信息,送入到嵌入式微處理器進行數據解析,最終得出戰車所在位置的位置、速度和海拔等信息。
3)外設控制模塊 包括LCD+觸摸屏、USB主/從口、電源、JTAG調試接口、復位電路。選用東華的自帶4線模擬電阻式觸摸屏和硬件驅動的3.5#TFT型LCD,用于人機交互以及現實解析后的GPS信息。USB主口用于擴展U盤,用于數據存儲,從口用于下載WinCE內核文件以及與軟件開發主機進行數據交互,JTAG調試接口用于硬件調試以及燒載Bootloader。
軟件平臺為微軟公司的嵌入式操作系統WindowsCE,它界面友好,支持嵌套中斷、更好的線程響應、更多的優先級別;支持串口和網絡通信;具有豐富的API函數,具有強大的開發工具;多硬件平臺支持,支持ARM、MIPS等處理器。經過Platform Builder定制移植的WindowsCE操作系統如圖2所示。
2 定位信息數據格式
GPS的輸出數據遵循NMEA-0183協議標準,即美海軍的電子設備標準。根據NMEA-0183協議,獲取GPS定位信息,必須將串行口的波特率設置為4800b/s,數據位設置為8 bit,停止位設置為1 bit,校驗為設置為無。該協議定義了GPS接收機輸出的標準信息,最常用、兼容性最廣的語句格式包括:$GPRMC、$GPGGA、$GPGSV、$GPGSA、$GPGLL等。應用到的GPS數據格式包括$GPRMC、$GPGGA、$GPGSV三種。其中,用$GPRMC語句獲取時間、經緯度、速度、年月日信息,用$GPGSV語句獲取海拔高度信息,用$GPGSV語句獲取可見衛星數信息及衛星的方位角和仰角信息,用以獲取衛星的視圖。各語句的數據段的含義,參考NMEA-0183協議標準。
3 GPS定位信息采集和處理的軟件實現
本系統的軟件開發在可視化開發工具Embedded VisualC++(簡稱EVC)中,采用MFC編程技術實現。
3.1 GPS數據處理狀態轉換
GPS與ARM之間用RS232串口方式進行通信,串口對象負責接收數據,并把接收到的數據放置到串口緩沖區。GPS對象按照協議結構負責處理串口對象接收到的數據。圖3為GPS數據處理之間的狀態轉換示意圖。GPS數據處理狀態共包括4個狀態:開始狀態、數據幀頭狀態、GPS數
據正文狀態和校驗狀態。
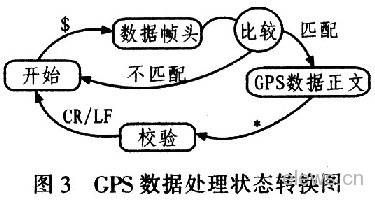
開始狀態是一個數據幀的起始狀態,它處理和判斷數據幀的起始字符$。若起始符號不是其中的$,則一直停留在開始狀態,直到$到來位置,數據幀頭狀態用于判斷數據幀的格式是否與我們目前需要的目標數據幀相匹配。如果相匹配,那么將退轉到下一個狀態:GPS數據正文狀態,開始進行數據處理。如果不匹配,則轉移到開始狀態。
數據處理中用到了緩沖區的概念,它一邊累積計算接收的數據的異或和,一邊把相應的數據域送入緩沖區。這樣既降低了數據提取校驗的復雜度,也提高了數據處理的延續性和正確性。當GPS數據正文狀態完成,進入“*”字符的時候,將進入數據校驗狀態,它用于判斷數據接收和處理的有效與否。若校驗成功,則接收有效,收到CR,LF字符后又重新跳轉到開始狀態。若校驗失敗,則放棄處理的數據,直接跳轉至開始狀態。
3.2 完整GPS數據幀的截取
了解了GPS數據處理的四個狀態之間的相互轉換,下面論述一個完整的GPS數據幀的提取和處理,它是獲取車輛GPS定位數據的關鍵。一個完整的GPS數據幀的提取流程如圖4所示。

圖4中,m_strRecDisp為一個CString變量,用于表示接收數據的字符串,該程序流程中,用到兩個最重要的函數即:字符(串)查找函數和字符串截取函數。
1)字符(串)查找函數 該函數CString∷Find()用于從一個已有的字符串當中查找與目標字符(串)相匹配的首次出現的一個單字符或一個子字符串。一個重要的函數原型為:int Find(TCHAR ch,int nStart)const:其中,ch為要查找的目標字符,nStart為開始查找位置。
2)字符串截取函數 該函數CString∷Mid()用于截取一個字符,也可從一個具體位置開始截取一個子字符串,返回值即為字符或字符串常量。函數原型為:Mid(int nFirst,intnCount)const;其中nFirst為字符串開始截取的位置,nCount為截取字符數目。
3.3 GPS數據幀的處理
截取出一個完整的數據幀后,將數據幀賦值給CString變量data,data再將其字符內容淵源不斷的送給緩沖pBuffer,解壓縮數據幀后,進入到如圖5所示的GPS數據幀處理流程。在處理GPS時間數據時,因為北京位于東八區,UTC時間與北京時間相差8 h,得到UTC時間后,如果要得到標準的北京時間,應在此時間的基礎上,加上8 h。

3.4 二維衛星視圖的獲取
衛星視圖的獲取首先要用到站心切平面坐標系。坐標系如圖6所示,站心切平面以P點的法線為Z軸且向上為正,X軸垂直于Z軸并指向北極.Y軸垂直于Z軸并向東為正。

顯然,若衛星P與觀測點之間的距離為r,E為任意可見衛星P的仰角,B為衛星的方位角,則P的三維坐標為(X,Y,Z)滿足:
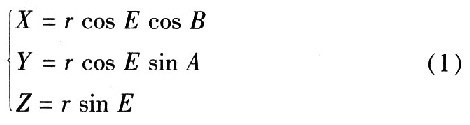
因為繪制的是二維圖形,故只能將半球坐標系壓縮到觀測者所在的平面內(稱這個面為基礎面),圖上所表示出的衛星的位置實際為衛星在該平面的投影點,該坐標系的參數有2個,一個是表達衛星的投影點和觀測者的方位關系的方位角;另一個是表達衛星真實所在位置以基礎面為準與觀測者所構成的仰角關系的仰角。有了這2個參數就能在該坐標系中唯一確定一個具有物理意義的點。本系統設計中,設計簡單的坐標系,它有2個同心圓和4條直線組成。繪制出衛星視圖之前進行的簡單的坐標變換算法思想為:將衛星實際的方位角、仰角立體坐標轉換為平面內的橫縱(PX、PY)坐標,具體表示如式(2)所示。其中,(POX,POY)分別為兩同心圓原點(看作是觀測點)在LCD上的像素坐標,而T為對話框窗體客戶區長度的1/4。
3.5 串口接收的實現
完成GPS定位信息的采集,需要實現的串口主要的API函數包括:
1)打開串口函數。原型為Open(LPT OpenPort(LPCTSTRPort,int BaudRate,int DataBits,int StopBits,int Parity)。其中,Port代表串口名,如COMl等,BaudRate為波特率,DataBits為數據位;StopBits為停止位,Parity為奇偶校驗。
2)關閉串口函數。該函數在程序操作串口發生錯誤時使用,用于關閉該串口。實現的主要方法是:先判斷串口操作句柄hComm的值是否為INVALID_HANDLE_VALUE,如果是,則調用SetCommMask(),將上述代碼段中的EV_RXCHAR改為0,然后清除緩沖區,再利用CloseHandle函數關閉串行口操作句柄。
3)添加打開串口單擊事件代碼,通過創建一個串口接收線程和顯示線程來實現。
4)串口接收線程CommRecvTread()與回調函數OnCommRecv()。串口接收線程為一個無限循環,它不斷查詢串口接收線程退出事件m_Exit-ThreadEvent。如果退出事件有效,則該循環結束退出。如果調用讀串口函數查詢得知接收到數據,則調用串口接收成功回調函數0nCommRecv()。
4 實驗數據及分析
設置好串口參數后,打開串口COMl,既可獲取實驗數據。圖7為在某型軍車上一次實測的數據。實測數據界面拍攝的時間為2009年11月10日晚上9點45分,地點為某訓練場。數據在靜止的狀態下測得。該定位顯示的數據包括“原始數據”和解析后“經緯度、時間、海拔”等信息。通過分析圖7(a)界面的數據發現,$GPGSV語句有兩條,而在“星數”對應的Edit框中顯示的定位所用衛星數為8,由于每一條GPGSV最多能顯示4顆衛星的信息,故$GPGSV語句為兩條。這說明星數與$GPGSV語句數是吻合的。而獲取有效的GPS定位信息,至少需要4顆定位衛星。這也說明此次數據是有效的定位數據。
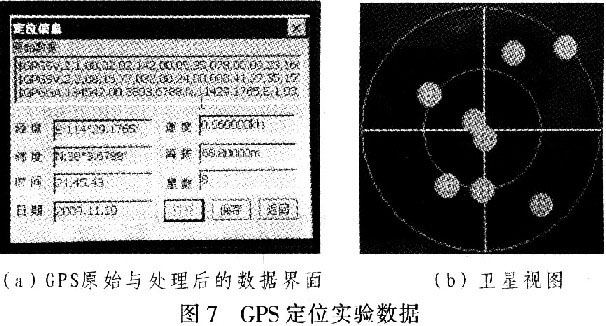
該界面顯示的經緯度信息分別為N:38°3.6788’,E:114°29.1765’;其中,N代表北緯,E代表東經。而用GoolgeEarth軟件查閱數據可知,石家莊軍械學院南門的精確經度/緯度信息為:北緯38°3.1650’,東經114°29.0046’,軍械學院西門的精確經度/緯度信息為:北緯38°3.394O’,東經114°28.5432’。通過與二者的經緯度信息比對發現,界面實時顯示的精度和緯度信息非常精確。通過實
時比對標準的北京時間,說明時間和日期信息顯示也完全正確。
速度信息在靜止情況下測得,故理想的速度為0 k/s。而實際測得數據分別為0.060 00 k/s,前文已論述,1 k/s換算成標準的速度信息約0.514 444 m/s,故測得的速度誤差分別約為O.030 867 m/s。可以看出,測量的速度誤差相對而言是很小的。
界面顯示的海拔信息為:68.800 00 m。而通過石家莊市規劃局提供的資料可知:石家莊市區二環路內地勢西北高,海拔高度為81.5 m,東南低,海拔高度為64.3 m。測得的海拔高度還是存在微小的誤差。這可能跟接收的GPS信號的漂移有關。從圖7(b)部分的衛星視圖可以看出,衛星與觀測點的方位關系能清晰的表示,而且衛星的編號也能實時顯示,從上到下依次分別為:23、17、3、4、19、20、32、11。
5 結論
GPS定位為單點定位,用一臺接收機觀測衛星,獨立定出觀測點在WGS-84(地心坐標)中的絕對位置。系統以ARM9為嵌入式微處理器,以WindowsCE為嵌入式操作系統,通過串行口實現GPS接收機與ARM之間的通信,構建了某型軍車的GPS定位信息采集系統。實驗表明:該系統能實時顯示精度較高、持久有效的GPS定位數據,具有重要的實用價值和參考意義。