
1 引言
飛行員操縱飛機時,除了通過各種儀表了解飛機的飛行姿態外,還要通過直接對操縱桿(或方向舵)施力來感受飛機的飛行姿態。殲擊機操縱桿/舵操縱力一位移性能評估是殲擊機產品質量檢測的主要項目之一,是指根據殲擊機操縱桿/舵操縱力一位移性能指標要求,檢測出其力和位移是否在規定的范圍內,并最終給出評估結果。其中力和位移是同一時刻的相對數據,因此要求采集必須同步。該系統主要完成對殲擊機操縱桿/舵操縱力和位移的同步數據采集,并通過無線的方法將采集到的力、位移數據傳輸給評估系統,為評估系統提供繪制力一位移曲線準確的測量數據。
2 系統整體設計
殲擊機操縱桿/舵操縱力一位移性能檢測評估系統由采集系統Ⅲ和評估系統構成。采集系統主要包括傳感器、信號調理電路、MCU和無線模塊。圖1為檢測評估評估系統硬件框圖。
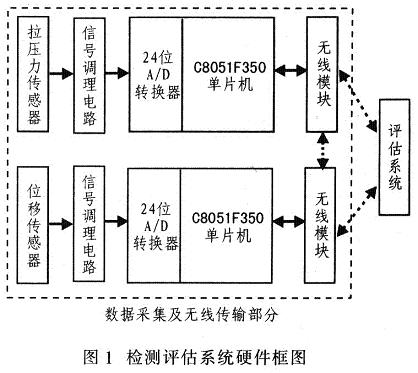
采集系統由兩片C8051F350分別控制,對殲擊機操縱桿/舵操縱的施力信號及同一時刻操縱連桿相對力的位移信號進行同步數據采集,然后由各自的無線模塊將采集到的數據傳輸給評估系統。評估系統利用接收到的數據繪制力一位移曲線,和標準曲線相對比后給出評估結果。
3 采集系統硬件設計
3.1 微控制器C8051F350
采集系統以C8051F350作為核心控制器,完成對力、位移信號的同步數據采集及無線傳輸。C8051F350是一款完全集成的混合信號片上系統型MCU,具有高速、低功耗、集成度高、功能強大、體積小巧等優點,其內部有一個全差分24位A/D轉換器.該轉換器具有在片內校準功能。兩個獨立的抽取濾波器可被編程到l kHz的采樣率。可使用內部的電壓基準,也可用差分外部基準進行比率測量。ADC0中包含一個可編程增益放大器,有8種增益設置,最大增益可達128倍。
3.2 信號調理電路
對殲擊機操縱桿/舵操縱的施力及連桿的位移分別通過拉壓力傳感器和位移傳感器后變成模擬電信號,但往往是很微弱的毫伏級信號.這就需要用放大器對信號加以放大。由于通用運算放大器一般都具有毫伏級的失調電壓和每度數微伏的溫漂,且運算放大器只有在信號源為單純有效信號,且沒有干擾的情況下才可用于小信號放大。而在傳感器的輸出端常會產生較大的干擾信號,有時甚至是共模干擾信號,可采用具有高輸入阻抗、低輸出阻抗、強抗共模干擾能力、低溫漂、低失調電壓和高穩定增益等特點的測量放大器作為前置放大器。經測量放大器輸出的信號中含有噪聲,要通過濾波電路濾波后接入C8051F350的模擬信號輸入端。
3.3 無線傳輸部分
射頻模塊nRF24L01是一款工作在2.4~2.5 GHz世界通用ISM頻段的單片無線收發器。它包括頻率發生器、增強型ShockBurstTM模式控制器、功率放大器、晶體振蕩器、調制器、解調器。nRF24L01具有接收和發送數據功能,可在接收模式與發送模式之間任意轉換。nRF24L01不僅具有自動應答及自動重發功能,而且在增強型ShockBurstTM模式下還具有數據包識別、地址及CRC校驗功能,在數據發送、接收過程中自動完成對一幀數據的CRC校驗,減少外部CPU的工作量和傳輸過程中可能出現的數據丟失現象,增強數據傳輸的可靠性。
4 采集系統軟件設計
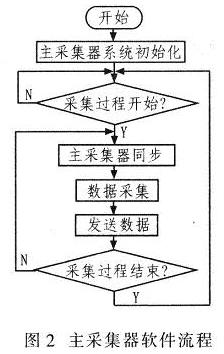
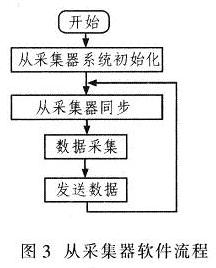
安裝在操縱桿手柄上的采集系統為主采集器,采集操縱桿/舵操縱的施力信號;和操縱連桿相連的采集系統為從采集器,采集操縱連桿位移信號。系統要完成對力和位移數據的同步采集,由主采集器控制采集過程的開始和結束。因為兩個采集器由兩片C8051F350分別控制,所以在數據采集開始前必須使主采集器和從采集器系統同步。主采集器和從采集器的軟件流程分別如圖2和圖3所示。
主采集器和從采集器系統同步是指兩個采集系統開始采集力數據和位移數據的時間是一致的。主采集器和從采集器進行系統同步的流程分別如圖4和圖5所示。
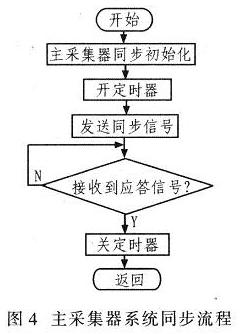
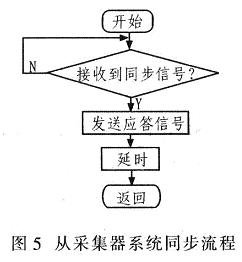
主采集器同步初始化后向從采集器發送一個準備開始采集的同步信號,隨機檢測判斷是否接收到從采集器發來的應答信號。同時主采集器使用定時器中斷監測同步信號是否丟失,定時時間要遠大于從發送同步信號到接收至應答信號所用時間的理論計算值。若定時內沒有收到應答信號則認為同步信號丟失,觸發中斷,在中斷子程序中將重新發送同步信號并重新裝載定時初值,直至收到應答信號。
主采集器的定時時間包括發送同步信號的時間、同步信號的傳輸時間、從采集器檢測判斷該信號的時間、發送應答信號的時間、應答信號的傳輸時間和關定時器的時間。可根據執行相應指令所用的機器周期數、C805lF350的機器周期、nRF24L01的數據傳輸率以及傳輸的數據量計算得出。從采集器接收到同步信號后,向主采集器發送一個應答信號,經過定時間的延時后兩個采集系統完成系統同步。該延時時間包括應答信號的傳輸時間、主采集器檢測判斷該應答信號的時間和關定時器的時間,需在測試現場經多次測試確定。因為主采集器和從采集器選用的同是C8051F350,機器周期相同,所以兩個采集系統在完成系統同步后的數據采集過程可視為是同步進行。
5 測試結果
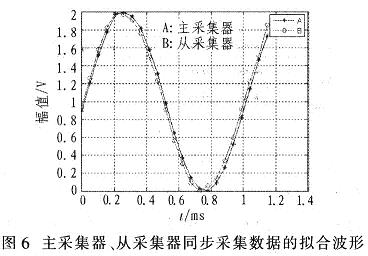
對主采集器、從采集器加入1 V直流偏置、頻率為1 kHz、峰值為1 V的同一正弦信號進行同步數據采集,利用MATLAB將采集到的兩路數據擬合。圖6為多次實驗中擬合效果較好的波形,C805lF350的采樣頻率為19.2 kHz。雖然圖6中的兩路波形存在一定的偏差,但通過計算可知這一偏差很小,對整個系統不會造成影響,實現了系統的同步數據采集。
6 結束語
無線同步數據采集系統通過軟件控制實現同步采集,減少硬件連接,節省資源。該系統具有電路簡單、體積小巧,使用方便等特點,可應用于其他相關場合。