
1 引言
隨著電力電子裝置的廣泛使用,由此引起的諧波污染問題逐漸受到了人們的重視。整流裝置是諧波主要的來源,因此有必要研制高功率因數(shù)、低諧波整流器以消除諧波源。與傳統(tǒng)的二極管不控整流、相控整流相比,四象限變流器具有功率因數(shù)高、直流側(cè)電壓穩(wěn)定、輸入電流諧波小、開關(guān)損耗小、電磁污染少等優(yōu)點[3]。
四象限變流器的控制策略主要有間接電流控制和直接電流控制兩種。間接電流控制通過調(diào)節(jié)變流器交流側(cè)電壓的幅值和相位達到控制輸入電流的目的[1]。雙閉環(huán)直接電流控制在間接電流控制的基礎(chǔ)上引入網(wǎng)側(cè)輸入電流反饋,具有動態(tài)響應(yīng)速度快、網(wǎng)側(cè)輸入電流諧波小和直流側(cè)輸出電壓穩(wěn)定等優(yōu)點[1]。本文首先介紹了四象限變流器的工作原理和數(shù)學(xué)模型,比較了基于直接電流控制與間接電流控制的四象限變流器工作性能,在此基礎(chǔ)上研究了直接電流控制四象限變流器的控制模型與PI參數(shù)設(shè)計。最后,通過仿真結(jié)果驗證了本文提出的直接電流控制四象限變流器具備優(yōu)良的穩(wěn)態(tài)和瞬態(tài)工作性能。
2 工作原理
四象限變流器的主電路結(jié)構(gòu)如圖1所示。其中UN為輸入電壓;電感LN為網(wǎng)側(cè)等效電感,起到傳遞能量、抑制高次諧波、平衡橋臂終端電壓和電網(wǎng)電壓的作用;RN為網(wǎng)側(cè)電阻;T1~T4為全控型開關(guān)器件(如MOSFET、IGBT等);D1~D4為續(xù)流二極管;Cdc為濾波電容,為高次諧波電流提供低阻抗通路,減少直流電壓紋波;C2、L2分別為二次濾波電容和電感;RL為負(fù)載電阻;Udc為直流側(cè)輸出電壓。
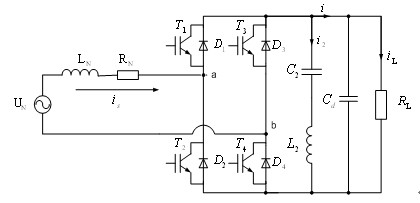
圖1 四象限變流器主電路
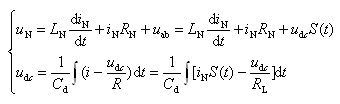
采用單極性調(diào)制的時候,變流器交流側(cè)電壓Uab將在Udc,0或0,-Udc之間切換。因此,單相四象限變流器主電路的數(shù)學(xué)模型為:
 (1)
(1)
式中:S(t)整流器開關(guān)函數(shù)。
3 雙閉環(huán)控制四象限變流器
3.1 直接電流控制與間接電流控制的比較
直接電流控制,是一種通過直接控制交流電流而使其跟蹤給定電流信號的控制方法。控制器具有電流控制環(huán),通過直接對電流調(diào)節(jié),使電流快速地跟蹤給定值,因此,直接電流控制四象限變換器具有很好的動態(tài)性能。另外對電流給定值限幅可以很好地限制輸出電流幅值。
間接電流控制也稱為相位幅值控制,它通過控制逆變器輸入電壓的幅值和相位來間接控制輸入電流。這種控制方式的穩(wěn)定性很差,系統(tǒng)動態(tài)響應(yīng)慢,在暫態(tài)過程中交流電流可能會出現(xiàn)直流偏移問題和很大的電流過沖。所以盡管幅相位控制已提出了10多年時間,但在實際系統(tǒng)和裝置中幾乎不被采用。
3.2控制模型的建立
根據(jù)四象限變流器的控制原理,得到圖2所示四象限變流器雙閉環(huán)控制框圖。
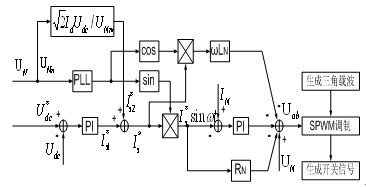
圖2 雙閉環(huán)直接電流控制原理
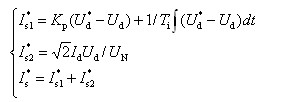
圖中U*d為中間直流側(cè)輸出電壓給定值,Ud為中間直流環(huán)節(jié)輸出電壓,Id為中間直流環(huán)節(jié)輸出電流。為了減輕直流環(huán)節(jié)中電壓環(huán)PI調(diào)節(jié)器的負(fù)荷,改善PI調(diào)節(jié)器的動態(tài)響應(yīng),用直流環(huán)節(jié)電流Id計算給定電流的有效分量I*s2,其結(jié)果與I*s1相加后作為交流電流的給定值I*s。由圖可得電流給定值I*s為:
 (2)
(2)
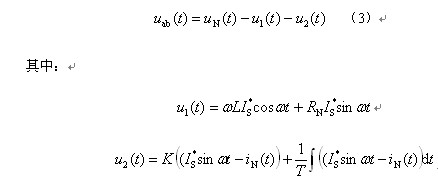
鎖相環(huán)檢測網(wǎng)側(cè)輸入電壓,得到的相位和頻率信息作為電流參考信號I*s的相位和頻率。電流內(nèi)環(huán)PI調(diào)節(jié)器輸出u2(t)使實際的網(wǎng)側(cè)輸入電流IN(t)跟蹤給定的電流參考信號I*s,從而實現(xiàn)網(wǎng)側(cè)輸入電壓與輸入電流同相位,也即網(wǎng)側(cè)輸入端為功率因數(shù)1。結(jié)合圖2和以上分析可得:
3.3雙閉環(huán)直接電流控制PI參數(shù)的設(shè)計
3.3.1 電流內(nèi)環(huán)的設(shè)計
電流內(nèi)環(huán)使輸入電流跟蹤指令電流,能夠提高系統(tǒng)的動態(tài)響應(yīng)能力。考慮到參數(shù)準(zhǔn)確性和漂移,以及實現(xiàn)電流控制無靜差,本文選用PI調(diào)節(jié)器,控制框圖如圖3所示。
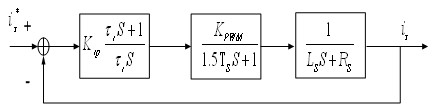
圖3 電流內(nèi)環(huán)控制器
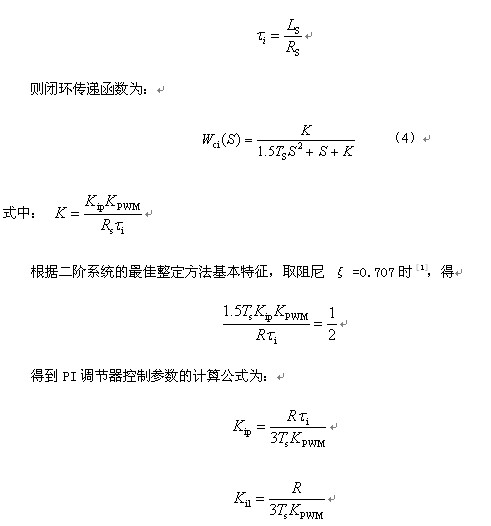
考慮到電流內(nèi)環(huán)需要獲得較快電流跟蹤性能,設(shè)計PI調(diào)節(jié)器的零點抵消電流控制對象傳遞函數(shù)的極點,即
3.3.2電壓外環(huán)的設(shè)計
假設(shè)直流端的濾波電容足夠大,則可忽略直流電壓紋波擾動,電壓外環(huán)控制器如圖4所示。
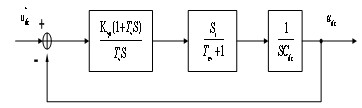
圖4 電壓外環(huán)控制器
得到電壓外環(huán)的開環(huán)傳遞函數(shù)為:
4 仿真結(jié)果分析
根據(jù)仿真模型,利用數(shù)學(xué)工具MATLAB/Simulink對本文提出的直接電流控制四象限變流器進行驗證。參數(shù)設(shè)計如下:
交流側(cè):網(wǎng)側(cè)交流電壓Us=1500V,頻率fs=50HZ,線路電阻RS=0.2Ω,線路電感Ls=1.19mH;直流側(cè): 輸出電壓指令Ud=3000V,電容Cd=0.01F,二次濾波環(huán)節(jié)C2=3mF,電感L2=0.84mH;電流內(nèi)環(huán)PI參數(shù)為:Kip=4.55,Kli=210,電壓外環(huán)PI參數(shù)為:Kvp=0.5,Kvi=291。
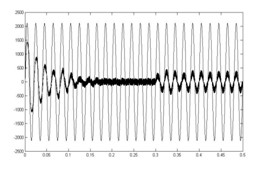
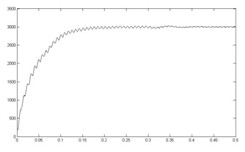
運用雙閉環(huán)直接電流控制,啟動過程的仿真結(jié)果如圖5所示。從圖中可以看出,雙閉環(huán)直接電流控制啟動電流波動比較小,動態(tài)響應(yīng)速度快,在0.3s時加上負(fù)載后,輸入電壓和電流的功率因數(shù)為1,得到良好的效果。
(a) (b)
圖5 軟啟動到加上負(fù)載時的仿真波形: (a) 輸入電壓和輸入電流波形; (b)輸出電壓波形。
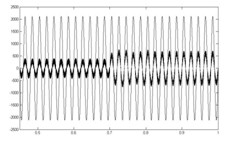
增大負(fù)載后的仿真波形如圖6所示。在負(fù)載切換的過程中,輸出直流電壓跌落30V,波動比較小,網(wǎng)側(cè)輸入電壓和輸入電流在經(jīng)過1個工頻周期后保持同相位,穩(wěn)定后變流器功率因數(shù)接近于1。
(a) (b)
圖6 增大負(fù)載時的仿真波形:(a)輸入電壓和輸入電流波形;(b)輸出電壓波形
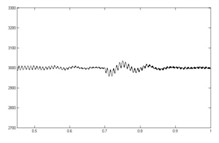
額定牽引負(fù)載到額定再生負(fù)載時的仿真波形如圖7所示。在狀態(tài)切換的過程中,輸出直流電壓限定為最大3200V,波動范圍不超過5%,網(wǎng)側(cè)輸入電壓和輸入電流在經(jīng)過3.5個工頻周期后保持功率因數(shù)-1。
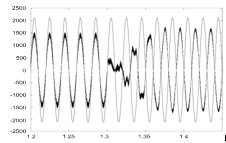
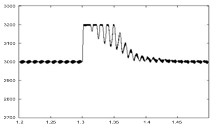
(a) (b)
圖7 額定牽引負(fù)載到再生負(fù)載時的波形:(a) 輸入電壓和輸入電流波形;(b) 輸出電壓波形
5 結(jié)語
本文分析了四象限變流器的工作原理,提出了四象限變流器的數(shù)學(xué)模型,建立了雙閉環(huán)直接電流控制的仿真模型。通過仿真對四象限變流器系統(tǒng)的結(jié)構(gòu)、系統(tǒng)的穩(wěn)定性、系統(tǒng)的動靜態(tài)響應(yīng)以及系統(tǒng)的參數(shù)對系統(tǒng)的可靠性、穩(wěn)定等性能的影響進行了研究。仿真結(jié)果表明,雙閉環(huán)直接電流控制四象限變流器具有良好的動態(tài)響應(yīng)和穩(wěn)態(tài)特性。