
虛擬儀器(Vinual Instrument,簡(jiǎn)稱VI)是日益發(fā)展的計(jì)算機(jī)硬、軟件和總線技術(shù)在向其他相關(guān)技術(shù)領(lǐng)域密集滲透的過(guò)程中,與測(cè)試技術(shù)、儀器儀表技術(shù)密切結(jié)合共同孕育出的一項(xiàng)全新的成果。由于儀器的專業(yè)化功能和面板控件都是由軟件形成,因此國(guó)際上把這類新型的儀器稱為“虛擬儀器”。它是利用微機(jī)的數(shù)據(jù)處理和圖形處理功能,將傳統(tǒng)物理儀器的專業(yè)化功能和面板控件軟件化,與檢測(cè)數(shù)據(jù)間的接口也通過(guò)計(jì)算機(jī)軟件來(lái)實(shí)現(xiàn)。從虛擬儀器顯示面板(如虛擬顯示屏、數(shù)碼顯示器和指示燈及示波器等,其在功能上與各種物理儀器相對(duì)應(yīng))可了解儀器的狀態(tài),讀取測(cè)試結(jié)果進(jìn)行分析。
1 車輛稱重傳感器概述
本文根據(jù)虛擬儀器的特點(diǎn),利用電容稱重傳感器的車輛載荷檢測(cè)裝置,以車輛緩沖減振機(jī)構(gòu)中的板彈簧作為稱重傳感器的彈性體,可隨時(shí)隨地進(jìn)行靜態(tài)或動(dòng)態(tài)檢測(cè)。在載荷作用下,汽車的緩沖減振機(jī)構(gòu)(板彈簧)產(chǎn)生變形,安裝在特定位置電容傳感器兩極板間的距離發(fā)生變化,電容值變化,傳感器的輸出電壓也隨之發(fā)生變化。基于虛擬儀器從測(cè)試靜態(tài)性能的參數(shù)分析入手,分析在車輛靜止時(shí)貨物變化時(shí)電容傳感囂兩極板間電壓變化的規(guī)律,為測(cè)試動(dòng)態(tài)性能作參考。對(duì)特定的載荷對(duì)應(yīng)的電壓值進(jìn)行分析,用虛擬儀器程序子VI的來(lái)進(jìn)行誤差分析和曲線擬合,既方便又直觀。電容稱重傳感器的安裝如圖1所示。
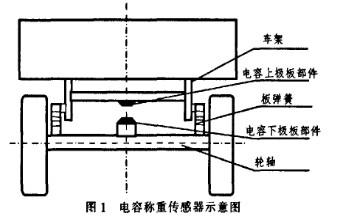
電容上極板部件安裝在車架下部,左右居中;電容下極板部件安裝在輪軸中部的上方,與電容上極板上下對(duì)正。車輛的每根輪軸上方均安裝一套電容傳感器。
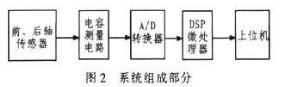
車輛稱重系統(tǒng)各元素之間的關(guān)系如下:
在載荷作用下,汽車的緩沖減震機(jī)構(gòu)(鋼板彈簧)產(chǎn)生變形,電容傳感器兩極板間的距離d發(fā)生變化,傳感器的電容值也隨之變化。預(yù)先標(biāo)定出傳感器電路輸出電壓值與該輪軸載荷值之間的關(guān)系,以后就可以根據(jù)各輪軸傳感器電路的電壓值得到該輪軸的載荷質(zhì)量。將各輪軸的載荷質(zhì)量相加,可以得到整車載荷質(zhì)量。
2 試驗(yàn)及數(shù)據(jù)分析
基于虛擬儀器的電容法檢測(cè)車輛載荷的靜態(tài)分析試驗(yàn)是在黑豹SM1010型汽車上進(jìn)行。該車輛為兩軸鋼板彈簧結(jié)構(gòu),額定載荷為500 kg。靜態(tài)實(shí)驗(yàn)過(guò)程中保持車輛處于水平狀態(tài),兩輪分別垂直壓在SCS-2蛩電子數(shù)字平臺(tái)秤上。以100 kg砝碼作為標(biāo)準(zhǔn)單位載荷,對(duì)車輛裝載或卸載。試驗(yàn)分為兩個(gè)行程(每行程又包括正反兩個(gè)方向),按照如下順序裝載或卸載:
正向1——在車輛自由狀態(tài)下(無(wú)遲滯),自空載逐漸裝載,直到傳感器輸出達(dá)到滿量程;
反向1——在正向1的基礎(chǔ)上,逐漸卸至空載;
正向2——在反向1的基礎(chǔ)上(有遲滯),自空載逐漸裝載,直到輸出再次達(dá)到滿量程;
反向2——在正向2的基礎(chǔ)上,逐漸卸至空載。
根據(jù)試驗(yàn)數(shù)據(jù),分別求出兩個(gè)行程正反向傳感器輸出的算術(shù)平均值再求出總進(jìn)程算術(shù)平均值。經(jīng)虛擬儀器編程軟件LabVIEW平臺(tái)下編程顯示,程序框圖前面板如下。
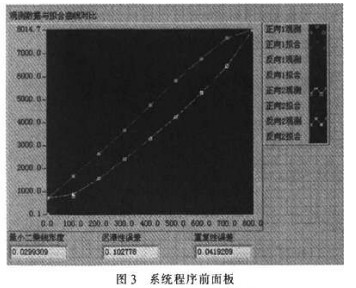
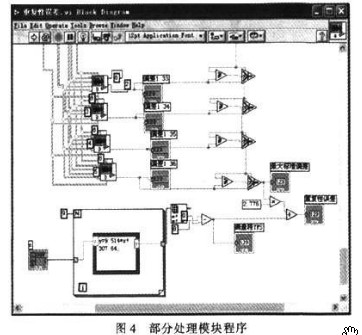
軟件編程采用模塊化設(shè)計(jì),主要包括曲線擬合模塊、直線擬合和誤差分析模塊等。誤差分析模塊中的最小二乘線性度、遲滯性誤差以及重復(fù)性誤差都采用子VI的形式,這為動(dòng)態(tài)參數(shù)的分析編程提供了很大的方便。誤差處理模塊主要是在分析數(shù)據(jù)的過(guò)程中,對(duì)數(shù)據(jù)的重復(fù)性誤差、最大標(biāo)準(zhǔn)偏差和遲滯性誤差等進(jìn)行分析處理。這些數(shù)據(jù)為后續(xù)的數(shù)據(jù)處理和電容稱重傳感器補(bǔ)償系統(tǒng)編程作為依據(jù),如重復(fù)性誤差編程如圖4所示。為了掌握加速度對(duì)電容法車輛載荷檢測(cè)的影響情況,根據(jù)預(yù)先標(biāo)定出的載荷質(zhì)量與電容傳感器輸出電壓之間的對(duì)應(yīng)關(guān)系,得到某一加速度(aH)下前、后輪軸以及整車的載荷質(zhì)量,結(jié)果見(jiàn)表1。
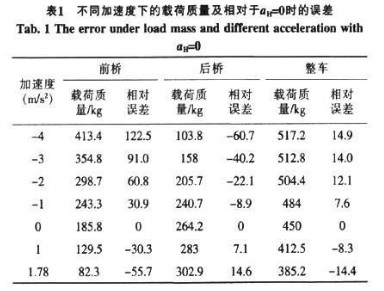
從表中敷據(jù)可知:制動(dòng)過(guò)程中,加速度aH=4 m/s2與aH=0 時(shí)相比,電容傳感器檢測(cè)到的前軸載荷質(zhì)量增大了122.5%,后軸減小了60.7%,整車載荷質(zhì)量增大了14.9%;加速過(guò)程中,加速度aH=1.78 m/s2與aH=0時(shí)相比,前軸載荷質(zhì)量減小了55.7%,后軸增大了14.6%,整車載荷質(zhì)量減小了14.4%。由此可見(jiàn),加速度對(duì)車輛載荷檢測(cè)的影響很大,為了保證檢測(cè)結(jié)果的準(zhǔn)確性,必須利用軟件補(bǔ)償。
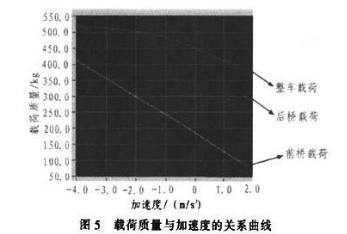
根據(jù)表1中的數(shù)據(jù)繪制出的載荷質(zhì)量與加速度之間的關(guān)系曲線見(jiàn)圖5。
由以上分析系統(tǒng)顯示結(jié)果可知,電容式車輛稱重裝置靜態(tài)時(shí)具有較好的重復(fù)性,但也存在著一定的非線性誤差及較大的遲滯性,直接影響著載荷檢測(cè)結(jié)果。引起非線性誤差的主要原因是電容相對(duì)變化量與極板之間的非線性的關(guān)系。而引起遲滯(包括反向行程不歸零)的主要有兩方面的原因:1)真實(shí)材料都在一定程度上存在遲滯現(xiàn)象;2)車輛載荷大小不同時(shí),鋼板彈簧的高度和長(zhǎng)度隨載荷而變化,彈簧片之間產(chǎn)生摩擦,彈簧片兩端與車架連接處也產(chǎn)生摩擦。采用高彈性材料的鋼板彈簧、改進(jìn)機(jī)械設(shè)計(jì)、減小摩擦等辦法可減小遲滯影響。而利用軟件方式進(jìn)行非線性補(bǔ)償及遲滯性補(bǔ)償效果十分明顯。
3 結(jié)束語(yǔ)
基于虛擬儀器的車輛稱重分析系統(tǒng),具有操作方便,用戶界面友好,易編程等特點(diǎn),盡管虛擬儀器沒(méi)有真正的儀表面板,但在功能上卻遠(yuǎn)勝于傳統(tǒng)物理儀器。實(shí)踐證明基于虛擬儀器的車輛稱重系統(tǒng)不僅適合于電容法檢測(cè)車輛載荷靜態(tài)測(cè)量分析,同時(shí)更適合于數(shù)據(jù)量更大的動(dòng)態(tài)測(cè)量分析。本文的創(chuàng)新點(diǎn)在于利用虛擬儀器的軟件面板對(duì)電容法檢測(cè)車輛載荷靜態(tài)測(cè)量進(jìn)行誤差分析,不僅擺脫了那種列表統(tǒng)計(jì)易出錯(cuò)的缺點(diǎn),而且結(jié)果方便快捷直觀。