
0 引言
目前的小區和樓宇供水系統普遍采用基于變頻調速技術的恒壓供水系統,與傳統的恒速供水系統相比取得了可觀的節能效果。但由于供水系統的泵出口壓力恒定,不能依據用戶需求做相應調節,因此從泵理論和水動力學來分析它并沒有把變頻調速的節能潛力充分發揮出來。
本文針對小區供水系統節能這一課題,提出了一種基于ARM的小區供水嵌入式智能控制系統,它能實時跟蹤用戶需求,因而能較充分發揮變頻調速的節能潛力,與常規恒壓供水系統相比能更大限度的節能。
1 ARM處理器的性能特點簡介
LPC2000系列CPU都是基于16/32位ARM7TDMI-S,并支持實時仿真和跟蹤的CPU,對于代碼規模有嚴格控制的應用場合可使用16位Thumb模式將代碼規模降低超過30%,而性能的損失卻很小。它們特別適用于工業控制、醫療系統、通信網關、協議轉換器以及其它各種類型的應用。LPC2129具有以下特點:① 16KB片內SRAM,256KB片內Flash程序存儲器;② 片內Boot裝載程序實現在系統編程(ISP)和在應用編程(IAP),Flash編程1ms可編程256字節,扇區擦除或整片擦處只需400ms;③ 多個串行接口,包括兩個UART,一個I2C和兩個SPI接口,一個PWM單元(6路輸出)、實時時鐘和看門狗定時器,多達47個可承受5V電壓的通用I/O口;④ 通過可編程的片內鎖相環可實現最大為60MHz的CPU工作頻率范圍,片內晶振的操作頻率范圍1-30MHz;⑤ 空閑和掉電兩種低功耗模式,通過外部中斷處理器從掉電模式中喚醒,外設功能可單獨使能/禁止,實現功耗最小化。
2 系統工作原理與軟硬件實現
2.1 系統工作原理
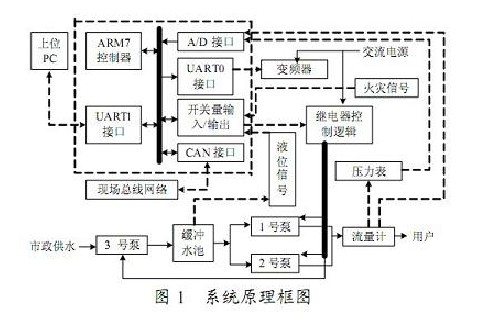
本系統將泵理論和水動力學做成專家系統,通過對泵出口的壓力和流量的采集,由專家系統運算后實時給出系統的工作點,再通過模糊PID控制迅速的把系統穩定在該工作點處。同時該系統還具有故障報警,常規PLC啟停邏輯控制,CAN通信,與上位機通信等功能,其中上位機采用VB編寫應用程序完成對下位機的監控。系統的原理框圖如圖1所示。
2.2 硬件設計
2.2.1 A/D轉換模塊
本系統直接采用ARM7-LPC2129的片內兩個A/D轉換模塊接收泵出口的壓力和流量采集信號,轉換好的數據送入專家系統進行進一步處理。
2.2.2 ARM7控制器ARM7控制器
嵌入了專家系統和模糊PID控制功能,其中專家系統部分把經A/D轉換后的流量和壓力信號進行運算,計算出用戶在該時刻的壓力需求并給出系統的工作點,然后經模糊PID控制把系統迅速穩定在該工作點處,系統的控制原理圖如圖2所示。
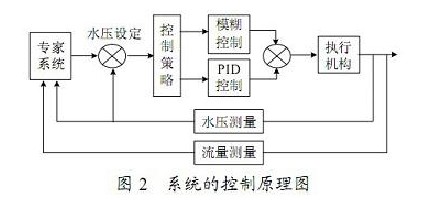
模糊控制具有對被控制對象的數學模型依賴性弱、不需要建立精確數學模型的優點,而PID控制算法具有簡單、容易實現等優點,因此,把模糊控制與PID控制在不同的區域實行分級控制,就能發揮模糊控制和PID控制各自的優點。在誤差較大時,采用模糊控制使系統快速趨向設定值,并且能實現超調較小的良好動態特性;誤差較小時即趨于穩定時,采用PID控制算法發揮PID控制精確、靜態誤差小等優點,進一步改善靜態特性。由于供水系統具有時滯性和非線性,同時建立它的精確數學模型在目前來看還是不可能的,因此本系統采用了模糊PID對供水系統進行控制。
2.2.3 串口通信模塊
本系統直接使用了ARM7-LPC2129的片內兩個UART接口。其中UART0與變頻器通信,UART1與上位機(PC)通信。
2.2.4 開關量輸入/輸出模塊
本系統采用了ARM7-LPC2129的通用輸入/輸出口做為開關量的輸入/輸出接口,用于接收火災信號、緩沖水池的液位信號,完成泵組啟停邏輯控制等相關輔助功能。
2.2.5 CAN接口模塊
現場總線是工業控制中的控制局域網,代表了未來工業控制的發展方向。由于它的飛速發展,各項工控技術均向現場總線靠攏,因此本系統還開發了CAN接口(ARM7-LPC2129帶有一個CAN接口)驅動程序,為系統能接入現場總線網絡提供技術支持。
2.3 軟件設計
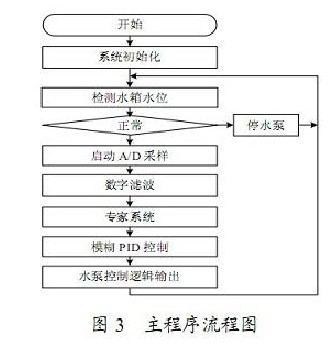
本系統應用程序采用結構化模塊設計,由主程序和中斷服務程序等組成。中斷服務程序定時檢測用戶端管道壓力和流量,并完成A/D轉換,采樣數據經數字濾波送專家系統分析確定系統的工作點。工作點確定后經模糊PID模塊迅速把系統穩定在該工作點處,通過上下位機的通信程序實現上位PC對下位機的監控,同時在軟件的設計中加入了軟件看門狗,增強了系統的抗干擾能力。主程序框圖如圖3。
3 結束語
由于本系統嵌入了含有泵理論和水動力學的專家系統及模糊PID控制,所以能較好地實時跟蹤用戶需求,更好地發揮了變頻調速的節能潛力并取得了良好的節能效果;同時系統還具有很好的快速性、穩定性和很好的抗干擾能力。由于具有良好的供水品質和節能效果,使得本系統不僅能應用在小區供水中還可以應用在樓宇供水及工廠企業的供水節能改造中。