
用機(jī)器視覺(jué)為機(jī)械手準(zhǔn)確定位物體,是現(xiàn)今眾多機(jī)器人走向柔性,適應(yīng)性的橋梁。但是,機(jī)器視覺(jué)只能給出物體在相機(jī)攝像范圍內(nèi)的位置。因此,怎樣讓機(jī)器人通過(guò)此位置來(lái)確定物體在機(jī)械手的坐標(biāo)?
在機(jī)器視覺(jué)和機(jī)器人的有效結(jié)合中, DVT 一直走在前列。例如 KUKA 的最新的視覺(jué)機(jī)器人,他們結(jié)合了DVT的 Framework 軟件而開(kāi)發(fā)了 KUKA 機(jī)器人獨(dú)有的 KUKA 視覺(jué),真正地使機(jī)器人有了視覺(jué)能力。 DVT 機(jī)器視覺(jué)長(zhǎng)期和機(jī)器人公司合作,可謂是機(jī)器人最具友好性的機(jī)器視覺(jué)系統(tǒng)。
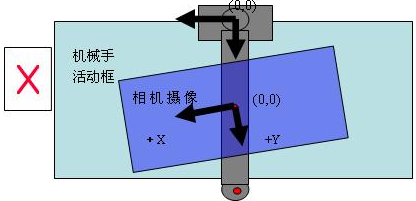
那么,要讓機(jī)器人通過(guò)機(jī)器視覺(jué)的信息來(lái)做出動(dòng)作,就需要作一些坐標(biāo)的轉(zhuǎn)換。典型的坐標(biāo)轉(zhuǎn)換,用戶必須確定相機(jī)坐標(biāo)的原點(diǎn)。這就需要用戶作一些腳本來(lái)確定原點(diǎn)在相機(jī)坐標(biāo)中的位置。這個(gè)原點(diǎn)又必須在機(jī)器人的坐標(biāo)中確定位置,這個(gè)偏差必須測(cè)量。而且,相機(jī)坐標(biāo)的刻度和實(shí)際刻度的比例也必須由用戶來(lái)測(cè)量,和機(jī)器人的坐標(biāo)刻度保持一致。因此,坐標(biāo)的轉(zhuǎn)換變得很不理想。
現(xiàn)在,理想的辦法是:機(jī)器人在成像范圍內(nèi)放置一個(gè)相機(jī)可以辨識(shí)的物體,然后機(jī)器視覺(jué)可以自動(dòng)地建立校準(zhǔn)刻度系統(tǒng)。
DVT 的新辦法就是:
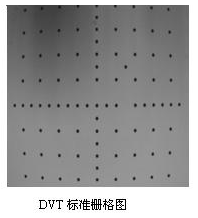
用一個(gè)有固定刻度的柵格圖,配合使用 Intellect 軟件中的“校準(zhǔn)”工具就可以建立坐標(biāo)轉(zhuǎn)換。 DVT 提供了一個(gè)標(biāo)準(zhǔn)的柵格。其刻度是 20mm , DVT 能夠直接識(shí)別出原點(diǎn)位置,刻度,建立坐標(biāo)。
所以, DVT 與機(jī)械人實(shí)現(xiàn)坐標(biāo)轉(zhuǎn)換變得非常簡(jiǎn)單。
·開(kāi)始… 用 DVT 智能相機(jī)對(duì)柵格板取圖。
·相機(jī)原點(diǎn)… 在用戶軟件 Intellect 中點(diǎn)擊“校準(zhǔn)”,相機(jī)原點(diǎn)就是柵格的中心交叉點(diǎn)。
·相機(jī)原點(diǎn)在機(jī)械手坐標(biāo)的位置… 直接測(cè)量柵格板中心交叉點(diǎn)的位置。
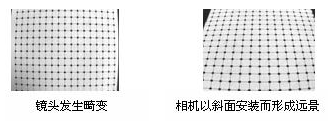
DVT 提供的標(biāo)準(zhǔn)柵格板,刻度非常精確,因此建立的坐標(biāo)將是很可靠的。在建立坐標(biāo)的時(shí)候,鏡頭的畸變和相機(jī)的斜裝都會(huì)對(duì)坐標(biāo)的刻度產(chǎn)生影響。考慮到此現(xiàn) 象,軟件中的“校準(zhǔn)”功能被設(shè)計(jì)成可以校準(zhǔn)圖像中出現(xiàn)的畸變和遠(yuǎn)景。這是因?yàn)闁鸥窀鼽c(diǎn)之間的距離都是 20mm , 軟件會(huì)計(jì)算出圖像各部位柵格距離的像素比例。您所要作的真的很簡(jiǎn)單。
客戶也可以選擇一個(gè)客戶自己的校準(zhǔn)圖板。 DVT 雖不能直接讀出進(jìn)行校準(zhǔn),但只要各點(diǎn)之間的距離一致,可以在軟件中設(shè)置你的原點(diǎn)坐標(biāo)。