
由于應用環(huán)境的復雜,地域的廣闊等不利工作條件,給開關磁阻電機的調(diào)速控制與相關參數(shù)監(jiān)控帶來了很多影響。因此,設計研制一種基于開關磁阻電機的遠程控制系統(tǒng)(SRD)具有十分重要的現(xiàn)實意義。
Controller Area Network(簡稱CAN),與一般的總線相比,CAN總線的數(shù)據(jù)通信具有突出的可靠性、實時性和靈活性。本文主要探討基于RS-485與CAN總線的開關磁阻電機遠程監(jiān)控系統(tǒng)的構成。SRD調(diào)速系統(tǒng)通常采用傳統(tǒng)PID控制策略,系統(tǒng)很難保守良好性能。目前,神經(jīng)網(wǎng)絡控制與模糊控制技術應用于SRD取得了一定的成績。
卡爾曼濾算法是一種遞推算法,對于系統(tǒng)存在過程及測量噪聲,狀態(tài)變量受到污染,可以利用卡爾曼濾波技術進行處理。本文將卡爾曼濾波器與傳統(tǒng)的PID控制相結合,使SRD控制效果得到明顯改善。
1 系統(tǒng)設計方案
基于CAN總線的開關磁阻電機遠程控制系統(tǒng)如圖1所示。系統(tǒng)主要包括PC(上位機)、RS-485與CAN結合的通信網(wǎng)絡、CAN智能節(jié)點與開關組電機四大部分。串行接口標準的選擇上位機與CAN智能節(jié)點間的距離通常較遠,上位機的Rs-232C接口的最大傳輸距離為15m,不能滿足要求。而RS-485串行數(shù)據(jù)通信標準可傳送1200m以上,因此宜選用后者。上位機本身具有RS-232C接口,可配備一塊RS232-RS485轉換板STD5630,實現(xiàn)RS-232電平到RS-485電平的轉換。

在該遠程監(jiān)控系統(tǒng)中,采用RS-485與CAN結合通信網(wǎng)絡,節(jié)省了CAN適配卡與專門的驅(qū)動程序,因此可靠性與性價比得到了較大的提高。
CAN總線智能節(jié)點在分布式控制系統(tǒng)中起著承上啟下的作用。它位于執(zhí)行機構所在的現(xiàn)場,一方面和上位機進行通信,以完成數(shù)據(jù)交換;另一方面又可根據(jù)系統(tǒng)的需要對現(xiàn)場的執(zhí)行機構進行控制和數(shù)據(jù)采集。典型的CAN總線控制節(jié)點是由微處理器、CAN控制器、CAN接口構成,如圖2所示。

2 硬件電路設計
2.1 RS-485接口電路設計
RS-485接口電路見圖3所示。該電路主要由光耦和RS-485芯片組成,光耦能排除由于共地而可能串入的干擾。RS-485芯片采用MAX 491,其作用是實現(xiàn)RS-485串口傳輸?shù)碾姎鈽藴省D中MAX491的2個有效電平相反的引腳——接收、驅(qū)動器允許腳接在了一起,即使得RS-485工作在半雙工方式。

2.2 CAN節(jié)點電路設計
系統(tǒng)各節(jié)點采用89C51單片機作為微處理器,選用SJA1000作為CAN控制器,并使用CAN控制器接口芯片82C250。為進一步提高抗干擾能力,在兩個CAN器件之間使用了由高速隔離器件6N137構成的隔離電路。CAN器件與微處理器的硬件連接圖如圖4所示。硬件電路中使用82C250的目的是為了增大通信距離,提高系統(tǒng)的瞬時抗干擾能力,保護總線。
3 CAN總線通信軟件設計
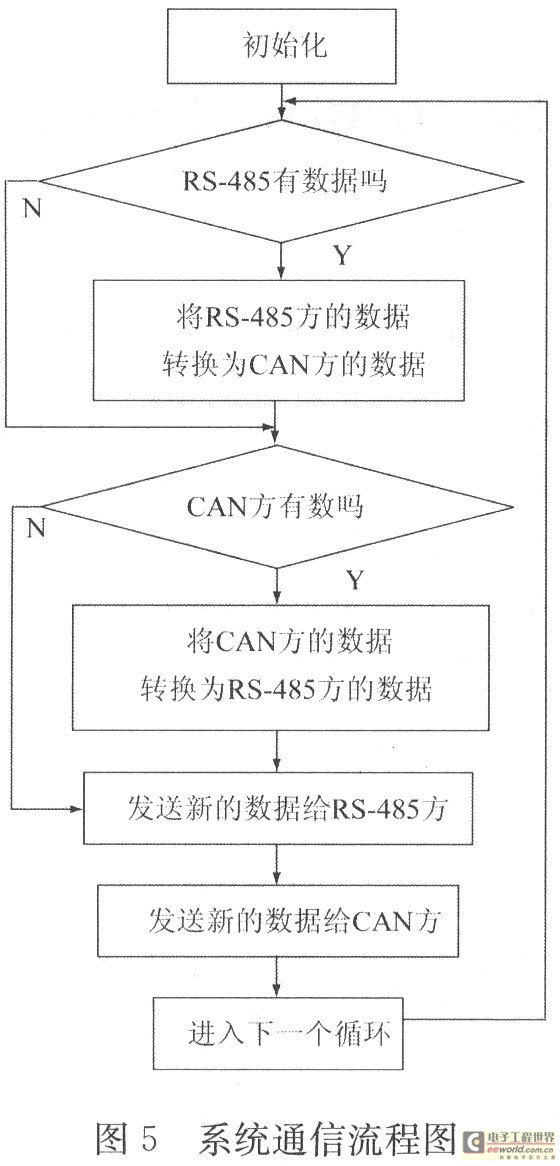
遠程控制系統(tǒng)軟件設計包括初始化程序與通信主程序設計。CAN初始化只能在復位模式下進行,初始化主要包括工作方式的設置,波特率參數(shù)設置和中斷允許寄存器IER的設置。作為軟件設計核心部分的是RS-485CAN接口通信編程,其程序流程圖如圖5所示。
4 基于卡爾曼濾波器的SRD控制器設計
在SRD控制策略上,主要以線性模型為基礎,結合傳統(tǒng)PI或PID控制器。但是普通PID控制器的參數(shù)難以自動調(diào)整,由此構建的SRD系統(tǒng)難以獲得理想的輸出特性。對于SRD系統(tǒng)中存在過程及測量噪聲,狀態(tài)變量受到污染,可以利用卡爾曼濾波技術進行濾波,將卡爾曼濾波器與傳統(tǒng)的PID相結合,可以使SRD系統(tǒng)控制效果得到明顯改善。
4.1 卡爾曼濾波器原理
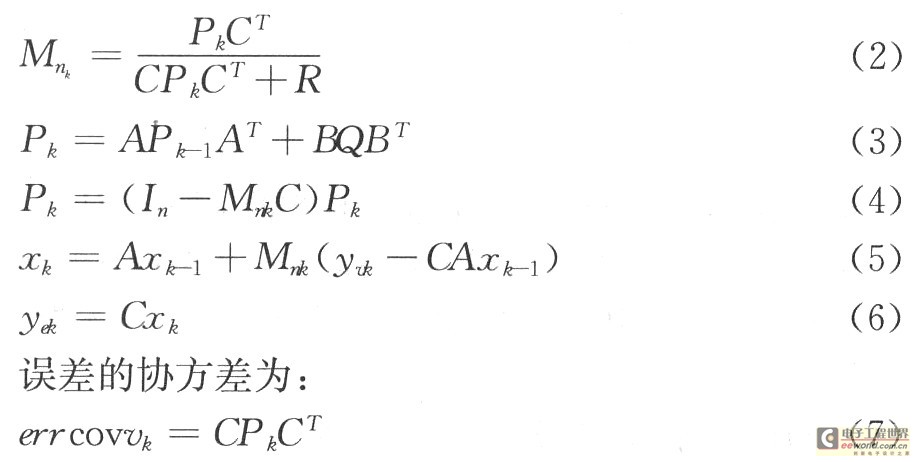
卡爾曼濾波是以最小均方差為準則的最佳線性估計,它根據(jù)前一個估計值xk-1和最近一個觀測數(shù)據(jù)yk來估計信號的當前值,利用狀態(tài)方程和遞推方法進行估計。設向量非平穩(wěn)狀態(tài)序列xk和yk用下面的動態(tài)方程描述:

式中:ωk為過程噪聲信號,vk為測量噪聲信號卡爾曼濾波的遞推算法為:
4.2 基于卡爾曼濾波器的PID控制結構與仿真
基于卡爾曼濾波器的PID控制系統(tǒng)的結構圖如圖6所示。

仿真的被控對象傳遞函數(shù)為

采用常規(guī)PID控制+卡爾曼濾波器控制,令過程噪聲ωk、νk協(xié)方差為1,幅度為0.02,輸入信號為階躍信號。在MATLAB中用隨機函數(shù)rand()來模擬白噪聲。沒有加卡爾曼濾波器的常規(guī)PID控制仿真結果如圖7所示,加入濾波器后PID控制階躍響應如圖8所示。

5 結束語
本文在開關磁阻電機調(diào)速系統(tǒng)中引入了CAN智能從站技術,并且將RS-485和CAN總線相結合,使開關磁阻電機擺脫舊的控制模式,為電機實現(xiàn)智能化、網(wǎng)絡化、遠程化控制提供一種新的思路。在開關磁阻電機調(diào)速系統(tǒng)中,將常規(guī)PID控制與卡爾曼濾波器相結合,仿真結果表明,基于卡爾曼濾波器的PID控制方法超調(diào)量小、控制效果好。