
PID" title="PID">PID控制是最常的控制策略,在工業過程控制中90%以上的控制回路具有PID結構。PID控制之所以被廣泛應用主要是因為它算法簡單,在實際中容易被理解和實現,而且許多高級控制都以PID控制為基礎。但是由于環境的變化,使被控對象具有時變性,參數經過一段時間以后會出現性能欠佳、適應性變差、控制效果下降等情況。因此,尋求參數自動整定技術,以適應復雜工況及高性能指標的控制要求,是實現節能優化控制的重要手段,具有重大的工程實踐意義。
1 自整定過程原理
本文主要研究了一種手持式的PID參數整定儀" title="參數整定儀">參數整定儀器,此整定儀具有整定單變量和雙變量的雙重功能,控制系統主要采用低能耗的MSP430微控制器,軟件部分采用的軟件開發平臺是IAR MSP430 V3.42A。
PID參數整定儀的實現不僅能夠簡化過程控制工程師的工作量,而且能夠改善整個PID控制領域的控制性能,在能源日益緊張的今天,對于節約能源起到非常重大的作用。自整定過程如圖1所示。其中過程1與過程2是兩個具有耦合的過程。
單片機" title="單片機">單片機" title="單片機" />單片機的便攜式PID參數整定儀的實現" height="219" src="http://files.chinaaet.com/images/20110527/540ebf8e-d72f-480e-8a77-a3aa28296698.jpg" width="300" />
具體過程為:整定儀提取過程的輸入輸出信號,然后通過過程模型計算部分計算出過程模型,將過程模型參數送給整定儀的算法整定部分,根據過程模型參數如果判斷系統為單變量系統則采用幅值相位裕度法對其進行整定,如果為雙變量則采用RGA失調因子法對其進行整定,最后將整定的結果顯示在LCD顯示屏上。
2 PID參數整定儀的功能分析
本文研制的便攜式PID參數整定儀主要具備如下功能:
(1)模擬信號輸入。能夠采樣接入標準的4~20mA電流信號,方便信號的處理。今后在此基礎上可以進行擴展,從而使其能夠接收更多的標準信號。
(2)模型辨識部分。設系統模型為二階加滯后模型,采用基于頻域的模型便是算法辨識出系統模型。
(3)PID參數的計算。根據辨識的模型,運用幅值相位裕度法與RGA失調因子法完成。
對PID控制器的自整定算法;其中幅值相位裕度法整定公式為:
其中T為時間常數,Am為幅值裕度,φm為相位裕度。通常情況下一般取Am≥2,φm=30~60°。
RGA失調因子法整定公式為:

(4)人機交互接口。能通過鍵盤進行參數的設置、修改,并且能夠將實時信息以及整定的結果等通過LCD顯示。
這些功能組合構成了便攜式的PID參數自整定器。
3 PID參數整定儀的硬件電路設計
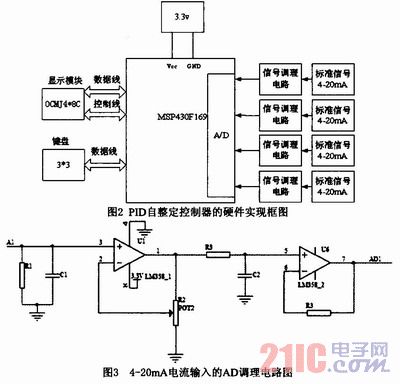
多變量便攜式PID參數整定儀由于其可以隨身攜帶,所以我們采用3.3V電池對其供電。這就要求裝置盡量保持低功耗以延長電池壽命,MSP430單片機正是由于其低功耗而被廣泛采用,因此選擇MSP430F169作為PID參數整定儀的控制器。
MSP430F169具體特性如下:
(1)低工作電壓范圍:1.8~3.6V;
(2)超低功耗,五種省電模式;
(3)從待機模式喚醒6μs;
(4)3通道DMA,12-Bit A/D轉換器,雙12-Bit D/A同步轉換器;
(5)串行通訊接口(USART0),功能如異步UART或同步SPI或I2C;
(6)串行通訊接口(USART1),功能如異步UART或同步SPI;
(7)具有可編程電平檢測的供電電壓管理器/監控器;
(8)串行在線編程,無需外部編程電壓,可編程的安全熔絲代碼保護;
(9)MSP430F169.60KB+256B Flash Memory,2KBRAM;
本整定儀適用于任何過程而不用管其暫態類型。根據PID參數整定原理和功能,系統的硬件框圖如圖2所示,圖3給出了4~20mA電流輸入的AD調理電路圖。
4 PID參數整定儀的軟件設計
4.1 PID參數整定儀主要程序模塊
在工程實際應用中,不僅需要完成硬件的相關設計與測試,還必須根據需要進行軟件的設計和調試工作,所以在設計出符合要求的硬件電路的基礎上,還要進行軟件系統的設計和調試。本控制器軟件部分主要包括以下程序模塊。
(1)系統的初始程序模塊。用來進行系統的初始化,包括設定初始狀態值和參數,確定A/D初始工作參數,檢測主電路是否上電和是否允許系統啟動運行等等。
(2)鍵盤掃描程序模塊。讀取鍵盤輸入值,包括PID初始設定值、系統設定值及采樣時間等等。
(3)采樣程序模塊。用來對信號進行采樣,采樣過程要進行濾波,減少噪聲干擾對采樣數據的影響,最后檢測采集的數據是否包含了對象足夠多的信息,清除不合格的采樣數據,保證所采樣數據的質量。
(4)模型辨識模塊。根據采樣數據采用相關系數辨識法辨識出系統的數學模型,使辨識的模型與原模型有較好的線性相關度。
(5)參數整定模塊。根據辨識出的系統模型采用相關的整定算法計算出新的PID參數值。
(6)LCD模塊。將相關的數據,像設定值、整定模式以及PID的參數值等,顯示在液晶屏上。
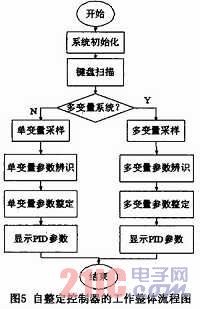
整個系統的程序結構框圖如圖4所示。

上面模塊還要進行詳細劃分,每個模塊之間的耦合很少,這樣就可以獨立編程、調試,提高了軟件開發的模塊性。
4.2 PID參數整定儀的總體工作流程
圖5是自整定控制器的工作流程圖,用戶輸入設定值,然后對過程的輸入量u和輸出量y進行采樣。對采樣的數據進行處理,并計算出最佳的PID參數整定值。整定具體過程如下:
(1)通過控制面板設定采樣時間及設定值以進行采樣。
(2)將采集的數據處理后得到辨識所需要的10~20個點。
(3)運用基于頻域的模型辨識算法對系統進行辨識,得到系統的模型。
(4)根據模型采用相應的辨識算法計算PID參數值。
(5)在LCD上顯示新的PID參數。
5 小結
介紹了本參數整定儀的各功能模塊,并且進行了硬件及軟件設計。此整定儀集單變量和雙變量整定功能于一身,適合于任何使用PID控制器的場合,不過只有在過程獲得平衡狀態時辨識方法才可使用。此整定儀整定出的PID參數在LCD上顯示。工作人員只需將整定出的新參數在系統中進行設置。此過程簡單實用,方便工作人員操作,并且由于設計小巧,便于工作人員隨身攜帶。