
一、引言
擴(kuò)頻通信具有抗干擾、抗多徑、低截獲概率等特點(diǎn),自從上一世紀(jì)40年代被提出以來(lái),其理論、方法、應(yīng)用技術(shù)得到了很大發(fā)展 直接序列擴(kuò)頻(直擴(kuò))是擴(kuò)頻通信常用的一種方式,90年代初被應(yīng)用于民用的CDMA蜂窩移動(dòng)通信系統(tǒng)(IS-95),顯示了其顯著優(yōu)點(diǎn)和較強(qiáng)的生命力
直接序列擴(kuò)頻(直擴(kuò))是擴(kuò)頻通信常用的一種方式,90年代初被應(yīng)用于民用的CDMA蜂窩移動(dòng)通信系統(tǒng)(IS-95),顯示了其顯著優(yōu)點(diǎn)和較強(qiáng)的生命力
測(cè)距是直擴(kuò)技術(shù)的一種典型應(yīng)用利用PN碼良好的自相關(guān)特性進(jìn)行延時(shí)的測(cè)量進(jìn)而獲得距離信息,較之傳統(tǒng)方法具有更高的抗干擾能力和測(cè)距精度工作在L波段的GPS系統(tǒng)采用的就是直擴(kuò)技術(shù),并在世界范圍獲得了巨大成功和顯著效益然而由于眾所周知的原因,對(duì)于某些特殊應(yīng)用,過(guò)于依賴GPS是危險(xiǎn)的
為在UHF頻段建立區(qū)域內(nèi)的抗干擾數(shù)據(jù)通信/定位系統(tǒng),在復(fù)雜的電磁環(huán)境下實(shí)現(xiàn)用戶間的信息互通和定位及相對(duì)導(dǎo)航的目的,我們利用直擴(kuò)技術(shù)完成了應(yīng)用于該系統(tǒng)的用戶端機(jī)中頻物理平臺(tái)的研制該平臺(tái)從一定程度上體現(xiàn)了“軟件無(wú)線電”的思想,其信息速率、調(diào)制方式、PN碼及處理增益、中頻頻率、輸出電平等都由軟件實(shí)時(shí)控制或更改,部分工作過(guò)程也由軟件編程實(shí)現(xiàn),具有較好的靈活性、通用性,并可進(jìn)行功能的擴(kuò)展
二、端機(jī)中頻單元的基本結(jié)構(gòu)
1.原理框圖
該端機(jī)的中頻系統(tǒng)原理框圖如圖1所示
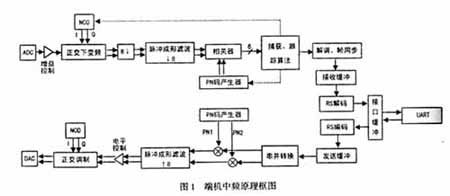
該系統(tǒng)大致工作過(guò)程如下:
發(fā)送通路中,首先對(duì)UART串行數(shù)據(jù)進(jìn)行緩沖和RS編碼,經(jīng)串并轉(zhuǎn)換后用本地PN碼進(jìn)行擴(kuò)展,然后進(jìn)入一個(gè)chip脈沖成形濾波器(平方根升余弦濾波器,滾降系數(shù)為0.4)經(jīng)內(nèi)插及低通濾波、電平控制后,進(jìn)行正交相位調(diào)制,取調(diào)制結(jié)果的實(shí)部作為輸出進(jìn)行DA轉(zhuǎn)換得到中心頻率為6 MHz的中頻信號(hào)DAC和ADC轉(zhuǎn)換精度為8 bit,速率為20 MHz圖中PN1和PN2為2個(gè)等長(zhǎng)PN碼,可以相同,也可不同若PN1和PN2不同時(shí),應(yīng)該保證其具有較好的互相關(guān)特性
接收通路中,6 MHz的中頻信號(hào)送入ADC,ADC的輸出數(shù)據(jù)經(jīng)增益控制進(jìn)行正交下變頻,變頻結(jié)果經(jīng)過(guò)抽取濾波器和chip脈沖成形濾波器(同發(fā)射通路中的脈沖成形濾波器)后進(jìn)入相關(guān)器輸入相關(guān)器的信號(hào)分別與3種相位的本地PN碼的進(jìn)行相關(guān),即當(dāng)前相位的本地PN碼、超前0.5 chip的本地PN碼和滯后0.5 chip的本地PN碼相關(guān)器輸出為分別對(duì)應(yīng)3種相位的3個(gè)復(fù)值,即sum_M、sum_E和sum_L,每符號(hào)周期更新一次3個(gè)相關(guān)值的時(shí)序關(guān)系示意圖如圖2所示圖中橫軸為時(shí)間,縱向虛線的間距為0.5 chip,點(diǎn)劃線表示下一次的相關(guān)時(shí)段

捕獲、跟蹤算法利用3個(gè)相關(guān)復(fù)值對(duì)本地PN碼相位和NCO輸出進(jìn)行實(shí)時(shí)調(diào)整,得到精確的PN碼相位后進(jìn)行解調(diào)、幀同步以及RS解碼
2.硬件組成
硬件組成較為簡(jiǎn)潔包含一片浮點(diǎn)DSP(TMS320C6701)及相應(yīng)的FlashROM(512K×8)、擴(kuò)頻ASIC、串行數(shù)據(jù)接口部分(TL16C750)、DAC(ADV7128)、ADC(TLC5540)以及CPLD(AS 64/32)圖3為硬件結(jié)構(gòu)的示意圖
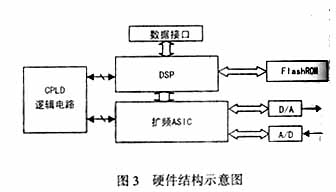
本中頻系統(tǒng)中幀格式形成、串并轉(zhuǎn)換、捕獲、跟蹤、頻移校正、解調(diào)、幀同步、FEC編解碼等計(jì)算及控制過(guò)程均由DSP實(shí)現(xiàn)DSP程序的設(shè)計(jì)環(huán)境為CCS2.0,程序主要由C語(yǔ)言編寫,混入少量匯編,以保證關(guān)鍵過(guò)程運(yùn)算和控制的實(shí)時(shí)性
三、接收通路的部分工作過(guò)程
相對(duì)接收通路而言,發(fā)送通路比較容易實(shí)現(xiàn)大部分發(fā)送通路的工作都由ASIC完成,并且異步串行數(shù)據(jù)的接收、RS編碼、串并轉(zhuǎn)換都相對(duì)簡(jiǎn)單且只占用DSP較少的資源在研制中,較大部分的工作量集中在接收過(guò)程的DSP程序設(shè)計(jì)
1.捕獲與跟蹤過(guò)程
捕獲是指接收機(jī)在開(kāi)始接收發(fā)送來(lái)的擴(kuò)頻信號(hào)時(shí)調(diào)整或選擇本地PN碼相位,使其與發(fā)送來(lái)的序列相位一致跟蹤是在捕獲的基礎(chǔ)上,對(duì)PN碼相位做進(jìn)一步的精確同步捕獲與跟蹤是直擴(kuò)通信的關(guān)鍵處理過(guò)程本中頻系統(tǒng)利用ASIC每符號(hào)周期提供的3個(gè)復(fù)相關(guān)值來(lái)進(jìn)行PN碼相位和NCO輸出的修正,實(shí)現(xiàn)捕獲
假設(shè)N表示PN碼長(zhǎng),ph表示PN碼相位,捕獲的基本過(guò)程的C函數(shù)流程大致表示為圖4
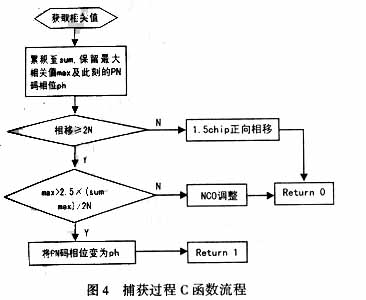
在捕獲過(guò)程中,此函數(shù)被不斷調(diào)用直至實(shí)現(xiàn)捕獲(Return 1)
由圖2和圖4可見(jiàn),在捕獲過(guò)程中,本地碼字相位每符號(hào)周期調(diào)整1.5 chip,即可在N/1.5個(gè)符號(hào)周期內(nèi)以0.5 chip為間隔遍歷所有PN碼相位上的相關(guān)值,當(dāng)最大相關(guān)值大于平均相關(guān)值的2.5倍時(shí)認(rèn)為實(shí)現(xiàn)了捕獲最長(zhǎng)捕獲時(shí)間即為

式中,Ts為符號(hào)寬度
例如:當(dāng)系統(tǒng)數(shù)據(jù)速率為4.8 kbps(符號(hào)速率為2.4k),PN碼長(zhǎng)為1 023時(shí):

此差值經(jīng)過(guò)放大、低通濾波和環(huán)路濾波(均由程序?qū)崿F(xiàn))后對(duì)本地PN碼相位和本地NCO相位進(jìn)行微小調(diào)整,實(shí)現(xiàn)最佳碼字同步,即實(shí)現(xiàn)跟蹤本系統(tǒng)PN碼跟蹤精度為1/8 chip
2.多普勒頻移檢測(cè)和修正
接收過(guò)程中本地NCO頻率應(yīng)始終對(duì)準(zhǔn)中頻頻率,以保證解擴(kuò)和解調(diào)的性能當(dāng)收發(fā)兩端存在較大的相對(duì)徑向速度時(shí)(如機(jī)載通信),載波頻率出現(xiàn)明顯漂移,影響接收性能本系統(tǒng)利用對(duì)復(fù)相關(guān)值進(jìn)行256點(diǎn)的基4復(fù)數(shù)FFT來(lái)實(shí)時(shí)估計(jì)譜包絡(luò)的偏移程度,根據(jù)誤差實(shí)時(shí)修改本地NCO頻率值,保證接收性能
需要指出的是,理論上直接對(duì)中頻采樣信號(hào)進(jìn)行功率譜估計(jì)也可實(shí)現(xiàn)多普勒頻移的檢測(cè),但由于擴(kuò)頻信號(hào)功率譜密度本來(lái)就較低,且端機(jī)所處的電磁環(huán)境有可能很惡劣,所以實(shí)際上這種方法很難有效檢測(cè)多普勒頻移中頻采樣信號(hào)的數(shù)據(jù)量很大,所以這種方法對(duì)計(jì)算速度的要求也很高相比而言,通過(guò)對(duì)相關(guān)值進(jìn)行FFT來(lái)進(jìn)行多普勒頻移的檢測(cè)和修正具有更高的可靠性和低得多的計(jì)算量
為保證計(jì)算速度,F(xiàn)FT算法使用遞歸的方法實(shí)現(xiàn)算法流程參見(jiàn)文獻(xiàn)〔2〕中的圖6.12
3.解調(diào)與幀同步
當(dāng)系統(tǒng)處于跟蹤狀態(tài)時(shí),由復(fù)相關(guān)值經(jīng)過(guò)簡(jiǎn)單的計(jì)算即可得到比特信息比特信息被送往串行緩沖區(qū),并進(jìn)行幀同步特征字的搜索搜索到特征字后,信息字節(jié)被送往接收緩沖區(qū),等待FEC解碼
4.FEC
FEC在無(wú)線通信中具有重要作用在設(shè)計(jì)中FEC主要解決的問(wèn)題是糾正隨機(jī)誤碼和較短的突發(fā)誤碼出現(xiàn)較長(zhǎng)的突發(fā)誤碼時(shí),接收通路一般處于重新捕獲的狀態(tài),而捕獲過(guò)程中FEC解碼不工作本端機(jī)的FEC采用(63,47)的RS碼,無(wú)交織
四、測(cè)距的實(shí)現(xiàn)
在整個(gè)通信/定位系統(tǒng)中,測(cè)距是用戶實(shí)現(xiàn)三維定位和相對(duì)導(dǎo)航的前提本端機(jī)進(jìn)行測(cè)距的基本原理是對(duì)接收和發(fā)送PN碼的相位差進(jìn)行檢測(cè),由此相位差估計(jì)出延時(shí),進(jìn)而估計(jì)出兩端機(jī)間的距離只要端機(jī)間能夠建立通信,即可在通信的同時(shí)完成測(cè)距,所以本端機(jī)的測(cè)距功能具有與通信相同的抗干擾能力
測(cè)距時(shí)首先由希望獲取對(duì)方距離的一端(主端機(jī))主動(dòng)發(fā)出測(cè)距指令,對(duì)方(從端機(jī))接收到此指令后對(duì)轉(zhuǎn)發(fā)信號(hào)進(jìn)行同步處理
符號(hào)同步:用接收信號(hào)的符號(hào)時(shí)鐘對(duì)轉(zhuǎn)發(fā)信號(hào)的符號(hào)時(shí)鐘進(jìn)行同步,使轉(zhuǎn)發(fā)信號(hào)和接收信號(hào)具有相同的符號(hào)起始時(shí)刻
偽碼同步:計(jì)算接收信號(hào)和轉(zhuǎn)發(fā)信號(hào)的偽碼相位差,根據(jù)此差值修正轉(zhuǎn)發(fā)信號(hào)的偽碼相位,使轉(zhuǎn)發(fā)信號(hào)和接收信號(hào)具有相同的偽碼相位需要注意的是,由于主端機(jī)和從端機(jī)的系統(tǒng)時(shí)鐘不可能完全一致,總是存在一個(gè)較小的頻差,所以在測(cè)距過(guò)程中需要不斷對(duì)偽碼相位差進(jìn)行實(shí)時(shí)檢測(cè)和修正,以確保從端機(jī)的收發(fā)偽碼同步
測(cè)距過(guò)程的C函數(shù)大致流程如圖5所示

當(dāng)系統(tǒng)數(shù)據(jù)速率為4.8 kbps,PN碼長(zhǎng)為1 023時(shí),chip寬度為0.407 μs由于本地PN碼同步精度為1/8 chip,所以信號(hào)往返延時(shí)的測(cè)量精度為
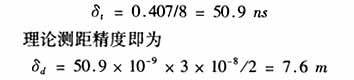
實(shí)際中由于收發(fā)兩端載波頻率不完全一致以及收發(fā)端PN碼相位差的抖動(dòng)造成了測(cè)距精度的降低增加雙工UHF射頻單元后,實(shí)測(cè)測(cè)距誤差小于16 m由于主端機(jī)采用計(jì)時(shí)器對(duì)信號(hào)往返延時(shí)進(jìn)行粗估計(jì),最遠(yuǎn)測(cè)距距離僅受通信距離限制,這保證了整個(gè)系統(tǒng)通信和定位的區(qū)域覆蓋能力相同
整個(gè)通信/定位系統(tǒng)正常工作時(shí),每個(gè)用戶端機(jī)通過(guò)對(duì)其它用戶進(jìn)行測(cè)距可獲取本機(jī)的相對(duì)位置信息,實(shí)現(xiàn)相對(duì)導(dǎo)航若有些(多于3個(gè))用戶端機(jī)已知絕對(duì)坐標(biāo)(如地面臺(tái)),則其它用戶可通過(guò)對(duì)這些端機(jī)的測(cè)距并結(jié)合卡爾曼濾波的方法來(lái)獲取自己的絕對(duì)坐標(biāo)對(duì)于空中用戶,本端機(jī)可與慣性導(dǎo)航系統(tǒng)交聯(lián),提高導(dǎo)航與定位的精度和穩(wěn)定度
五、結(jié)束語(yǔ)
將中頻系統(tǒng)中擴(kuò)頻調(diào)制中的一個(gè)支路(圖1中的PN1支路)用作導(dǎo)頻信道并增添軟件接口,可以組建同步CDMA或準(zhǔn)同步(同步精度為幾個(gè)chip)CDMA數(shù)據(jù)網(wǎng)絡(luò)通過(guò)端機(jī)間的精確同步和功率控制提高系統(tǒng)容量和定位精度,使系統(tǒng)的優(yōu)良特性得以充分發(fā)揮和利用
本端機(jī)的參數(shù)可以靈活設(shè)置,可以實(shí)現(xiàn)GPS信號(hào)的C/A碼捕獲(擴(kuò)頻系數(shù)為1 023,chip速率為1.023 Mbps時(shí)),但需要更改和增添軟件及射頻部分
在信道質(zhì)量較好或無(wú)特殊抗干擾要求時(shí),本端機(jī)可以工作在非擴(kuò)頻方式下,這時(shí)最高數(shù)據(jù)速率可以達(dá)到4.096 Mbps(QPSK調(diào)制)
本端機(jī)處于試驗(yàn)完善階段研制過(guò)程中考慮到功能的擴(kuò)展及軟件調(diào)試和更改的要求,選用了處理能力較強(qiáng)的DSP,留有較大的處理余量,在必要時(shí)可以加入語(yǔ)音壓縮編碼和更高性能的FEC
參考文獻(xiàn)
[1]朱近康.CDMA擴(kuò)頻通信技術(shù)[M].人民郵電出版社,2001.
[ 2]A. V. Oppenheim,R. W. Schafer. Discrete-Time Signal Processing[M].Prentice Hall 1989.
1989.
[3]楊小牛,等.軟件無(wú)線電原理與應(yīng)用[M].電子工業(yè)出版社,2001.
[4]查光明,熊賢祚.?dāng)U頻通信[M].西安電子科技大學(xué)出版社,1990.