
摘要:設計了基于FPGA" title="FPGA">FPGA和NioslI軟核的全數字逆變焊接電源控制器" title="電源控制器">電源控制器,采用變參數PID和改進的I-I型雙閉環電流-弧長控制策略,并應用于數字化MIG焊接電源系統中。介紹了該電源控制器各模塊的功能及設計方案,分析了MIG焊接電流和弧長的控制問題,并進行了仿真和實際焊接試驗。
關鍵詞:FPGA;NioslI;變參數PID;雙閉環控制;數字MIG逆變電源
1 概述
脈沖金屬惰性氣體保護焊(pulsed metal inert gas welding),簡稱MIG焊。MIG焊在工藝上具有以下優點:焊接保護作用好,焊縫金屬純凈,焊接過程穩定,焊縫成形好等。目前,國內逆變焊機多采用以DSP為核心或以MCU+DSP為核心的控制結構。當需要實時采集焊接數據并傳送到上位機上時,單個DSP將難以勝任,以DSP為核心控制器的一種改進的處理方案是采用MCU+DSP或者多個DSP配合完成焊接控制和實時通信等環節。該方案無疑增加了系統的成本和復雜程度。
采用高密度的FPGA取代傳統的模擬驅動型控制芯片,可大大提高控制器電路設計的集成度,同時提高逆變電源控制器設計的靈活性和電源系統的抗干擾能力、控制精度。但是,FPGA作為核心控制器也存在缺點,其存儲能力和軟件的擴展接口能力有限。
NioslI軟核可以根據用戶的要求來定制和拓展,FPGA內部引入NioslI軟核采用SOPC的設計思路,可以彌補單獨使用FPGA的缺陷,使得基于FPGA硬件邏輯的并行快速性充分發揮的同時,軟件接口和擴展通信能力也大大加強。本文采用嵌入NioslI軟核的FPGA作為逆變電源的核心控制結構。
2 逆變電源控制器的硬件設計
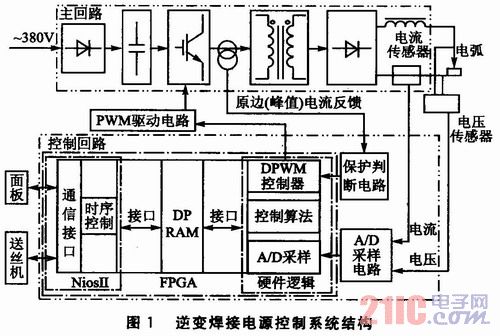
全數字逆變焊接電源控制系統的硬件結構如圖1所示。主要分為兩部分:焊接電源主回路和控制回路。主回路的工作過程為:380 V工頻交流電整流濾波后變為520 V左右直流電,經逆變環節變為高頻方波交流電,經中頻降壓變壓器和輸出整流-濾波環節后變為低壓直流電供焊接使用(受控環節為橋式逆變過程)。控制回路的核心器件為FPGA,其內部設計包括:FPGA硬件邏輯部分、NiosII" title="NiosII">NiosII軟核部分,以及DPRAM和接口邏輯。
2.1 FPGA硬件邏輯設計
FPGA硬件邏輯設計主要包括ADC" title="ADC">ADC采樣控制器、DPWM控制器以及雙閉環控制算法的設計。
2.1.1 ADO采樣控制器
全數字逆變焊機工作頻率為20~40 kHz,采樣速度要求較快;為了滿足電源輸出控制的精度,要求采樣精度要足夠高。另外,由圖1可知,系統需要同時采集電源的輸出電壓和電流兩路信號。采用ADI公司的AD7863。
其轉換速率為175 ksps,并行輸出接口,轉換精度最高為14位,內置兩個獨立A/D轉換器。根據其數據手冊中提供的ADC轉換時序,可以將ADC控制器分為7個狀態:S0,空閑狀態;S1,啟動轉換;S2,A/D正在轉換,Busy信號置高電平;S3,轉換完成,Busy信號置低,發送讀取命令;S4,讀取第一個轉換值;S5,讀完第一個轉換值,發送第二個讀命令;S6,完成第二個通道的讀取,轉移至S0。
根據以上的設計思路,采用VHDL語言描述、以狀態機的形式設計ADC控制器。
2.1.2 DPWM控制器
數字PWM(DPWM)控制器作為連接控制算法與焊接電源主回路的橋梁,作用至關重要。在以DPWM方式控制的逆變電源系統中,DPWM一般可以分為電壓型DPWM和電流型DPWM兩種方式。電流型DPWM反饋電流和鋸齒波疊加后,與控制信號直接比較,DPWM信號可以迅速輸出電流的變化,動態性能較好,因此本文采用電流型設計方案。
DPWM控制器一般需要滿足:占空比可變,而且PWM占空比更新快;有足夠的死區時間保證IGBT可靠關斷;能快速抑制不正常輸出電流的突變,以防止焊接電源負載在短路、焊接電弧、斷路之間切換時造成系統不穩定;當出現過流等異常現象時,能快速封鎖DPWM驅動信號,保護主回路。
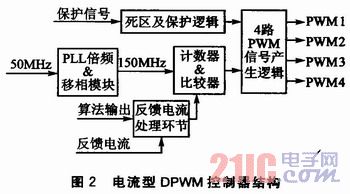
此外,為了避免系統輸出出現極限震蕩現象,要求DPWM控制信號的分辨率要高于采樣分辨率。本設計中,ADC有效采樣分辨率設置為10位,采用150 MHz的計數頻率和30 kHz的逆變器開關頻率,由式(1)可推算出DPWM控制信號的分辨率:
![]()
其中,fCLK為計數(時鐘)頻率,fSW為逆變器開關頻率,為DPWM控制信號的分辨率。代入實際數據可得,計數上限為5000,即至少13位的分辨率,高于ADC的采樣分辨率。綜合上述分析,電流型DPWM控制器的結構如圖2所示。
2.1.3 雙閉環控制算法
(1)電流控制方案
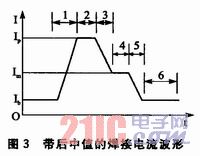
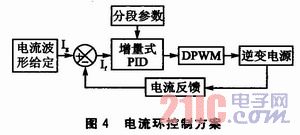
脈沖MIG焊一般采用帶后中值的焊接電流波形,如圖3所示。焊接過程的要求各階段電流穩定,且峰值電流Ip、基值電流Ib、中值電流Im以及電流變化斜率都應精確控制,以保證焊縫質量。因此,保證控制脈沖參數的精度為電流控制的基本要求。閉環形式的PID算法最為常用,但是各階段的電流變化斜率不盡相同,即使反復選擇PID算式的kp、ki、kd參數,也只能折中各階段的控制指標。變參數PID控制則可以分段設定kp、ki、kd參數,優化控制效果。本文采用變參數PID作為控制方案。
根據波形的6個階段,將PID參數分為6組,分別分段調試取優后存儲。工作時控制器根據當前的焊接電流階段選擇最優PID參數,以充分保證焊接電流的各個指標。這里采用增量式PID方案,變參數PID電流環控制方案如圖4所示。
(2)弧長控制方案
焊接電弧的穩定對于焊接質量的提高和保證焊接電源適應不同的焊接工況十分重要。由于焊接電弧電壓直接影響弧長的變化,而電弧電壓隨著焊接電流的改變而變化,因此弧長控制和電流控制是關聯的。
當前對焊接電弧的調節主要有2種方式:以脈沖峰值電流Ip和基值電流Ib均保持不變的I-I方式,以及脈沖電壓Up和基值電流Ib保持不變的U-I方式。I-I方式由于Ip和Ib均為恒流外特性,可以達到穩定的熔滴過渡,并且通過控制脈沖電流波形可以精確地控制熔滴過渡行為。但I-I方式是通過調節脈沖頻率來實現電弧長度的調節,存在調節速度慢且弧長變化時脈沖周期劇烈變動等缺點。本文采用在不影響熔滴過渡過程的前提下對Ip和Ib進行閾值范圍內微調變化的方式,不但可以減小電流脈沖頻率變化的劇烈程度,而且可以加快電弧動態調節過程。這樣電流控制構成內環,弧長(壓)控制構成外環。雙閉環控制算法如圖5所示。

2.2 NiOSIl軟核設計
NiosII是專門針對Altera公司FPGA的32位嵌入式CPU。它是一個完全由Altera FPGA的邏輯單元和嵌入式RAM塊實現的RISC結構的軟核CPU。NiosIICPU提供3種不同的配置:NioslI/f(快速型)、NiosII/s(標準型)和NiosII/e(經濟型)。可以通過SOPC Builder來選擇所需的NiosII軟核,根據具體的應用需求來定制它的外圍設備,還可以通過自定義指令和外圍模塊來增加NiosII系統的功能。這里考慮到功能需要和FPGA內部資源占用率,選用NioslI/e型CPU。
在本設計中,NiosII/e型CPU任務有:與面板通信,將電流波形和其他焊接參數傳送到FPGA的DPRAM中,并且讀取DPRAM中的焊機數據傳送到面板上;負責保護氣體起停、快送絲、慢送絲等焊接的時序控制。因此NiosII軟核的軟件設計包括:與DPRAM接口、焊接時序控制,以及控制送絲機和面板通信。根據上述要求,通過SOPC Builder配置的NioslI軟核系統資源如圖6所示。

2.3 DPRAM和接口邏輯設計
NioslI和FPGA硬件邏輯之間的數據交換可以采用DPRAM、SPI和SCI等形式。DPRAM采用并行傳輸,傳輸速度快,通信協議簡單,而且FPGA中一般有DPRAM的宏模塊可供使用。因此,本文采用DPRAM作為各種焊接波形數據和工藝參數的存儲媒介。采用FPGA內部DPRAM宏模塊,只需根據需要修改位數、容量等參數。考慮本設計的需要,DPRAM選擇16位,容量為1K字。采用DPRAM作為通信中間環節,關鍵問題是如何合理解決以下2個問題:
①DPRAM與NiosII的接口。可以通過為NiosII添加I/O口以模擬DPRAM讀寫時序進行接口,也可以直接利用NiosII中的Avalon總線和DPRAM互連。采用I/O口模擬讀寫時序速度較慢且浪費FPGA的內部邏輯資源,本文采用自定義邏輯模塊將Avalon總線與DPRAM進行連接,根據Avalon總線的讀寫時序設計接口模塊。
②DPRAM與FPGA硬件邏輯的接口。本文結合SOPC Builder幫助文件中給出的DPRAM讀寫時序,設計簡單的邏輯實現接口。
3 仿真與實驗
3.1 ADC控制器仿真
ADC控制器可以使用QuartusII自帶的SignalTapII邏輯分析儀進行仿真驗證。SignalTapII邏輯分析儀可以直觀地觀測ADC控制器采集到的當前ADC的轉換結果,準確而高效。為了加快仿真速度,對ADC的轉換值不加濾波處理;為避免最低位劇烈抖動,仿真時僅僅采用高12位,去掉最低兩位的結果。參考電壓5 V,將電壓通道接到了模擬地(理論值為0000h),電流通道連接到2.54 V左右的模擬電壓(理論值為0820h)。 SignalTapII仿真結果如圖7所示。
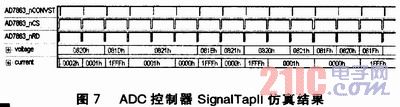
可見,所設計的ADC控制器能夠穩定地控制AD7863工作,除了稍有抖動之外(未加濾波環節),采樣結果準確可靠。
3.2 DPWM控制器仿真
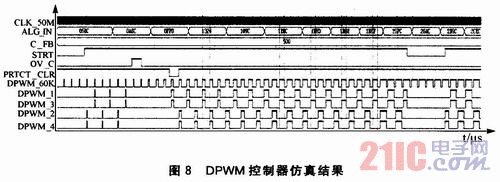
為了驗證所設計的DPWM控制器是否合理,在保證仿真有效的前提下做如下約定:保護清除按鍵和DPWM啟動按鍵信號均以直接數字量置位來代替;將算法輸出信號ALG_IN視作給定;反饋電流數字量設為恒值500;死區時間設定為3.0μs,最小脈寬占空比為2.4%。
仿真環境為QuartusII-7.2,仿真結果如圖8所示。啟動信號STRT有效之前DPWM輸出全部封鎖,輸出均為低電平;STRT有效后,在給定小于最小脈寬時輸出最小脈寬,隨著給定的增大,脈寬變大;當檢測到過流信號(OV_C)時,4路DPWM輸出立即置低(即全部被封鎖),且置低狀態能一直持續到保護信號PRTCT_CLR清除后才結束。可見DPWM的輸出嚴格受控。
3.3 焊接試驗波形
3.3.1 靜態負載焊接試驗
在靜態負載條件下,NioslI通過DPRAM給定定頻100 Hz和帶后中值的脈沖電流。電流脈沖參數為:峰值300 A,峰值時間4 ms;中值100 A,中值時間1 ms;基值電流30 A。采用6段PID參數。實際輸出的電流和電壓波形如圖9所示。
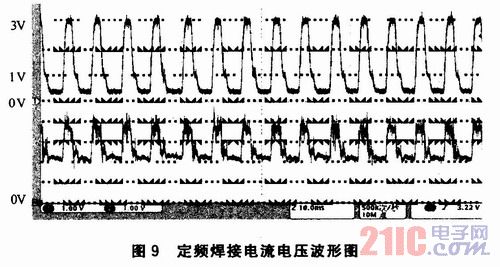
圖9中,上面為通道1,波形為輸出電流,每格1 V,代表實際焊接電流100 A;下面為通道2,波形為輸出電壓,每格1 V,代表實際焊接電壓10 V。可見,焊接電流波形與給定的脈沖波形(如圖3所示)基本一致。
3.3.2 動態負載焊接試驗
雙閉環控制策略下,死區時間3.0μs,最小脈寬占空比為2.4%。電流脈沖參數為:峰值450 A,峰值時間3 ms;中值150 A,中值時間2 ms;基值電流50 A。6段PID參數。給定平均電弧電壓為30 V,保護氣體成分為20%CO2+80%Ar,保護氣體流量為25 L/min,碳鋼焊絲直徑為1.2 mm,送絲速度為4.5 m/min。試驗結果表明,當焊槍大范圍抖動時,為了調節電弧的平均電壓以保證焊接電弧穩定,電源系統實時地穩定電弧,且電流脈沖的頻率變化均勻,峰值、基值分別隨焊槍的抖動而上下微調。
4 結論
本設計采用FPGA+NioslI軟核為控制核心,設計了全數字化脈沖MIG逆變焊接電源控制器。試驗結果證明:數字化的設計思路增強了系統的穩定性和靈活性;一塊FPGA在保證控制器功能的前提下,大大降低了開發成本,縮短了開發周期;在FPGA內部實現6段變參數PID以及改進的I-I電流-電弧雙閉環的控制策略,脈沖電流跟蹤效果良好,焊接電弧調節穩定,動態性能良好,實際焊接效果出色。本設計的核心邏輯都是基于統一性較好的VHDL語言設計,并采用模塊化的設計方案,因此便于推廣和移植。