
在電力線載波通信中,微機自動盤的功能多,邏輯性強,MCS—單片機" title="51單片機" target="_blank">51單片機在該系統中處理任務時的實時性尤為突出。由于該系統整機配置的主要服務對象是電力調度,且它的使用環境將來多為無人值守站,所以系統工作是否穩定直接影響到電力線載波機的整機性能。針對電力通信特點,在考慮穩定運行方面我們采取了以下幾項措施。
1 設置上電延時復位電路
1.1 為什么要進行上電復位
計算機在啟動運行時都要進行復位。作為在控制領域中應用最廣泛的單片機,復位處理更是設計中的關鍵。單片機內部的各個功能部件均受特殊功能寄存器控制,程序運行直接受程序計數器指揮,寄存器的復位狀態決定了單片機內有關功能部件工作用的初始狀態,而程序的正常運行就是從這個狀態開始的。如果上電時沒有做到正確復位,就可能使CPU從不定地址開始執行指令,系統就得不到正確的初始化,也就不能正常工作。
1.2 復位條件
單片機是靠外部電路復位的。上電復位步驟:
(1)必須首先建立電源Vcc;
(2)Vcc穩定后(達到允許值)時鐘振蕩器起振;
(3)復位腳必須在振蕩器起振后至少保持兩個機器周期復位電平。也就是說,復位腳(RST)復位電平維持時間應包括Vcc的建立時間、振蕩器起振時間和至少兩個機器周期時間。
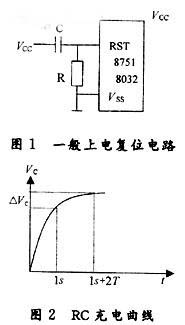
1.3 一般上電復位電路
在上電時,電源Vcc的建立時間應小于幾十ms,振蕩器的起振時間取決于振蕩器頻率,對于10MHz晶體,起振時間為1ms,對于1MHz晶體,起振時間一般為10ms。此時可采用一般上電復位電路(圖1)。
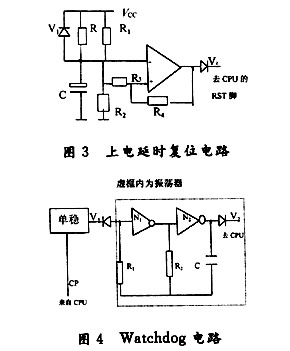
如果對電源Vcc建立運行速度相當緩慢的系統,RC上電復位電路將不能保證系統可靠復位。假如,建立時間為1s,則RC充電曲線如圖2所示,此時很難使RC電路輸出正常的復位電平(隨著RC的充電,RST腳的電位ΔVc越來越低,在電源穩定后,ΔVc的幅度不滿足兩個機器內復位電平的要求,RST腳就可能退出復位狀態)。而且,RST腳因易受電源干擾而產生誤復位。
1.4 上電延時復位電路
雖然電力線載波機電源現都采用開關工作方式,建立速度比以往的串聯式或并聯式調整電源快,但由于機器本身使用的電壓等級多,功率要求大,開機后各種電源的建立至少還需要500ms時間才能穩定(+5V電源也不例外),所以在自動交換系統中采用一般上電復位在時間上幾乎不可能滿足復位要求,這是因為 MCS—51采用一般上電復位電路就要求電源至少在20ms內建立才能保證復位。這屬于硬件特性,對于克服這一時延性困難來說,我們不可能做到使所有電力電源都迅速建立(該產品要利用與之配套的設備電源),只有針對MCS—51自身特性在系統設計上采取相應措施。
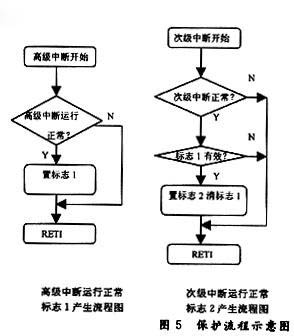
MCS—51硬件復位要保證在Vcc穩定、振蕩器起振后至少有兩個機器周期(24個振蕩器周期)的高電平出現在RST端,即執行內部復位。為此我們設計了一個上電延時電路,該電路能針對不同電源建立時間的長短,改變R、C參數,可調整延時時間。由于采用了該電路,在無人值守站,系統不會因停電、再上電而出現“死機”造成通信中斷現象,如圖3所示。R1、R2提供比較電位(2/3Vcc),RC充電時間由R、C參數決定,R4為復原信號邊緣校正,V1二級管為頻繁上電時電容C的泄放電路,V2與Watchdog電路在邏輯上成或關系。開機時同相端電位大于反相端電位,輸出為上升的電位(在電源建立期間),RC充電時間足夠延遲到電源穩定,當RC充電電壓大于2/3Vcc時,該電路輸出“0”,至此上電復位正常完成。
在電力線載波通信中,微機自動盤的功能多,邏輯性強,MCS—51單片機在該系統中處理任務時的實時性尤為突出。由于該系統整機配置的主要服務對象是電力調度,且它的使用環境將來多為無人值守站,所以系統工作是否穩定直接影響到電力線載波機的整機性能。針對電力通信特點,在考慮穩定運行方面我們采取了以下幾項措施。
1 設置上電延時復位電路
1.1 為什么要進行上電復位
計算機在啟動運行時都要進行復位。作為在控制領域中應用最廣泛的單片機,復位處理更是設計中的關鍵。單片機內部的各個功能部件均受特殊功能寄存器控制,程序運行直接受程序計數器指揮,寄存器的復位狀態決定了單片機內有關功能部件工作用的初始狀態,而程序的正常運行就是從這個狀態開始的。如果上電時沒有做到正確復位,就可能使CPU從不定地址開始執行指令,系統就得不到正確的初始化,也就不能正常工作。
1.2 復位條件
單片機是靠外部電路復位的。上電復位步驟:
(1)必須首先建立電源Vcc;
(2)Vcc穩定后(達到允許值)時鐘振蕩器起振;
(3)復位腳必須在振蕩器起振后至少保持兩個機器周期復位電平。也就是說,復位腳(RST)復位電平維持時間應包括Vcc的建立時間、振蕩器起振時間和至少兩個機器周期時間。
1.3 一般上電復位電路
在上電時,電源Vcc的建立時間應小于幾十ms,振蕩器的起振時間取決于振蕩器頻率,對于10MHz晶體,起振時間為1ms,對于1MHz晶體,起振時間一般為10ms。此時可采用一般上電復位電路(圖1)。
如果對電源Vcc建立運行速度相當緩慢的系統,RC上電復位電路將不能保證系統可靠復位。假如,建立時間為1s,則RC充電曲線如圖2所示,此時很難使RC電路輸出正常的復位電平(隨著RC的充電,RST腳的電位ΔVc越來越低,在電源穩定后,ΔVc的幅度不滿足兩個機器內復位電平的要求,RST腳就可能退出復位狀態)。而且,RST腳因易受電源干擾而產生誤復位。
1.4 上電延時復位電路
雖然電力線載波機電源現都采用開關工作方式,建立速度比以往的串聯式或并聯式調整電源快,但由于機器本身使用的電壓等級多,功率要求大,開機后各種電源的建立至少還需要500ms時間才能穩定(+5V電源也不例外),所以在自動交換系統中采用一般上電復位在時間上幾乎不可能滿足復位要求,這是因為 MCS—51采用一般上電復位電路就要求電源至少在20ms內建立才能保證復位。這屬于硬件特性,對于克服這一時延性困難來說,我們不可能做到使所有電力電源都迅速建立(該產品要利用與之配套的設備電源),只有針對MCS—51自身特性在系統設計上采取相應措施。
MCS—51硬件復位要保證在Vcc穩定、振蕩器起振后至少有兩個機器周期(24個振蕩器周期)的高電平出現在RST端,即執行內部復位。為此我們設計了一個上電延時電路,該電路能針對不同電源建立時間的長短,改變R、C參數,可調整延時時間。由于采用了該電路,在無人值守站,系統不會因停電、再上電而出現“死機”造成通信中斷現象,如圖3所示。R1、R2提供比較電位(2/3Vcc),RC充電時間由R、C參數決定,R4為復原信號邊緣校正,V1二級管為頻繁上電時電容C的泄放電路,V2與Watchdog電路在邏輯上成或關系。開機時同相端電位大于反相端電位,輸出為上升的電位(在電源建立期間),RC充電時間足夠延遲到電源穩定,當RC充電電壓大于2/3Vcc時,該電路輸出“0”,至此上電復位正常完成。
2 應用看門狗電路實現系統保護
2.1 復位寬度設計要求
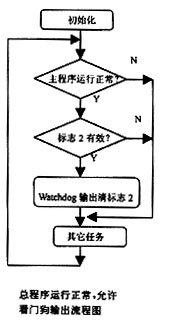
因為MCS—51內部無Watchdog功能(8096系列單片機有),所以需在外部擴展此電路,如圖4所示。單穩電路為可再觸發電路,只要觸發脈沖(CP)正常地作周期性輸出,單穩一直處于瞬態階段,輸出低電平。通過V1嵌位,振蕩電路停振,振蕩器輸出“0”不影響RST腳,CPU處于正常工作狀態,如果因某種原因CP無輸出,單穩處于穩態,輸出“1”振蕩器起振,輸出方波,送至RST腳。為了保證復位,方波寬度遠大于兩機器周期,且至少應大于CP兩個周期,以保證程序有時間作Watchdog
處理(輸出正常的觸發脈沖,使振蕩器停振,輸出“0”不影響RST腳)。
2.2 周期性觸發脈沖軟件設計考慮
由軟件產生周期性觸發信號來控制該電路工作,以確保系統正常運行。在產生該周期性信號時應注意以下幾點:
(1)信號不采取定時器中斷方式獲得。這基于以下考慮:在初始化后,定時中斷即開始工作,假如由于某種信號干擾使主程序轉飛,但并未破壞定時器有關中斷控制設置,定時中斷有可能正常工作,則周期性脈沖可能輸出正常,此時Watchdog則不能使主程序恢復正常。
(2)Watchdog輸出模塊放在主程序中,主程序有幾個循環體就應放入幾個Watchdog輸出模塊,以確保主程序不被破壞。
(3)工作程序部分包括主程序和中斷程序,Watchdog不僅要保護主程序轉飛,而且也要保護中斷程序轉飛。保護流程如圖5所示。設高級中斷運行標志為1,次級中斷運行正常標志為2。
如果高級中斷不能正常運行,那么無標志1,雖然次級中斷工作正常,但因無標志1,則無標志2,最終主程序因無標志2,故Watchdog無輸出,結果導致系統復位。同理,如次級中斷不能正常工作,那么標志2產生,最終導致系統復位;若主程序自身失效,則也無定時輸出,最終也導致系統復位,重新使系統恢復正常運行。
3 被破壞數據的修復
Watchdog電路只能保證系統失效后能得到復位處理,重新恢復正常工作,但這說明以前有的工作狀態已被破壞,只是不“死機”而已。程序的失效、轉飛往往是因為有關轉移標志、數據或SFR控制字被破壞所致,不管如何好的系統,要想完全避免這些破壞是不可能的,因為多種多樣的干擾源根本無法消除,要想保護這些過程數據不被破壞,只有設法在保護方面盡可能做得更加完善些。
3.1 特殊功能寄存器(SFR)內容的實時刷新
一般情況下,在初始化程序中SFR已被預置好初值,它代表一定的工作方式。在正常運行后,SFR的內容一般是不變的。因為SFR內容代表特定的工作方式,該內容被破壞也就改變了原來設定的工作方式,從而使系統失常。比如,系統設置為以中斷方式工作后,就存在中斷返回問題,在初始化程序中已設置堆棧(SP)內容,如果由于某種干擾,SP內容被改變,那么中斷返回將不能轉向預定地址,系統工作必然失常。為了盡量減少破壞的機會,我們將有關SFR放在主程序Watchdog循環輸出模塊中,以使其不斷得到刷新,程序示意圖如下:
LOOP: ·
·
·
MOV SP, #10H
MOV TMOD, #12H
MOV SCON, #00H
ANL PSW, #0E7H
SETB TR0
SETB TR1
SETB IT0
MOV IE, #8AH
MOV IP, #02H
·
·
·
LJMP LOOP
3.2 數據區以及位區嵌套式保護
數據RAM區的單元內容多數是運行中經運算或經各種處理而得到的關鍵數據,這些數據被破壞的可能性更大些,除了干擾源破壞,另外運算錯誤或處理失誤,也會造成錯誤數據。比如,要想確切地取得一個收信標志位01H的值,首先需查尋收信端是否有效,收信處理將作出判斷是否被干擾,如被干擾,則刷新標志(SETB 01H),若有效,則標志為CLR 01H,然后進入收信處理。下面的這些處理都是以位01H作前提的,如果該位被破壞(SETB01H),那么收信處理將無法進行,所以一旦確定進入收信狀態后,在處理階段,要經常重復確認使標志保持有效,即CLR01H,直到該任務完成為止。這也就是說,在完成某一具體任務時,對相關的標志或數據要進行可靠性診斷,作為實時修復,盡量減少被破壞的可能。
4 結束語
保證系統穩定運行和設計一種系統的抗干擾方式,手段多種多樣,不能局限于常規方法,要根據應用系統的具體狀況及干擾源的種類,采取相應措施。我們所采取的上述方法,經幾年來的使用表明比較適合WCZ—X型交換系統,在實際應用中該產品的可靠性得到了很好的驗征。
參 考 文 獻
1 何立民.MCS—51系列單片機應用系統設計、系統配置與接口技術.北京:航空航天大學出版社,1990
2 涂時亮,張友德,陳章龍.單片微機MCS—51用戶手冊.上海:復旦大學出版社,1990