
0 引言
CAN (CONtroller Area Network) 即控制器局域網絡, 屬于工業現場總線的范疇。與一般的通信總線相比, CAN總線的數據通信具有突出的可靠性、實時性和靈活性。事實上, 由于其良好的性能及獨特的設計, CAN總線越來越受到人們的重視。同時, 由于CAN總線本身的特點, 其應用范圍目前已不再局限于汽車行業, 而且向著自動控制、航空航天、航海、過程工業、機械工業、紡織機械、農用機械、機器人、數控機床、醫療器械及傳感器等領域發展。為此, 本文給出了利用兩片DSPIC30F4011, 并用雙絞線將兩單片機的CAN模塊連接起來組成一個CAN總線, 而兩單片機相當于CAN總線上的兩個結點, 再編寫程序實現兩單片機之間簡單通信的方法。
1 DSPIC30F4011簡介
DSPIC30F4011 是Microc hip 公司新推出的DSPIC30F系列16位單片機。它是一種具有單片機和DSP綜合功能的16位CPU, 該器件不但保留了單片機的基本性能、豐富的外圍模塊, 同時還兼具DSP的高速運算能力。DSPIC30F4011單片機上集成的CAN模塊, 使其能夠與其它CAN模塊或數字信號控制器進行通信, 其上的CAN模塊是一串行接口, 此接口的設計允許在噪聲環境下進行通信, 同時它也是一個通信控制器, 可以實現BOSCH 規范中定義的CAN 2.0 A/B 協議, 該模塊也支持該協議的CAN 1.2、CAN2.0A、CAN 2.0BPassive 以及CAN2.0B AcTIve等版本。
2 CAN總線實現方案
本文介紹的系統中的每個節點都由單片機、CAN控制器、MCP2551收發器組成。單片機主要用于系統的計算及信息處理等功能; CAN控制器主要用于系統的通信; MCP2551收發器主要用于增強系統的驅動能力。系統的發送過程是首先由單片機對外圍設備或其他節點傳送過來的信息進行處理, 按CAN規范規定的格式將其寫入CAN控制器的發送緩沖器, 并啟動發送命令, 再把數據發送到CAN總線上; 而其接收過程則是CAN控制器從CAN總線上自動接收數據, 并經過過濾后存入CAN接收緩沖器, 且向單片機發出中斷請求,此時單片機可從CAN的接收緩沖器讀取要接收的數據。圖1所示是CAN總線通信的簡單示意圖。
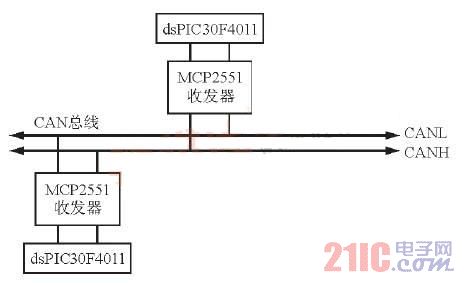
圖1 CAN總線通信示意圖
3 CAN總線通信程序設計
在程序設計時, 可把一端作為發送數據端,另一端作為數據接收端。信息從CAN模塊發送到CAN總線通常是由CAN模塊自動完成的。發送程序只需把發送的信息幀送到CAN的發送緩沖區,然后啟動發送命令即可。發送程序可采用查詢方式。作為發送端, 也可對其發送緩沖寄存器進行賦值, 以作為發送的信息, 具體方法如下:
C1TX0B1 = 0x5555;
C1TX0B2 = 0x5555;
C1TX0B3 = 0x5555;
C1TX0B4 = 0x5501;
之后應將這些數據發送到CAN總線上, 并將報文發送優先級設成最高級, 以便于數據發送。
信息從CAN總線到CAN接收緩沖區也是由CAN控制器自動完成的。接收程序只需從接收緩沖區讀取要接收的信息即可。接收程序同樣可采用查詢方式。接收緩沖器會*總線是否有進入的報文, 如發現總線上有報文, 即接收報文。接收端程序中可定義四個變量, 并把接收緩沖寄存器的值賦予變量, 通過變量值的變化來判斷接收端是否從總線上接收到了報文。
兩端CAN模塊寄存器的配置必須匹配, 否則兩者將無法進行通信。其具體配置方法如下:
C1TX0CON = 0x0003;
C1TX0SID = 0x0020;
C1TX0DLC = 0x01c0;
C1RX0CON = 0x0000;
C1RX0DLC = 0x0008;
C1RXF0SID = 0x0020;
C1RXM0SID = 0xffff;
C1CFG1 = 0x00ff;
C1CFG2 = 0x07ff;
在寄存器設置完成之后, 系統將進入正常工作模式。
4 測試結果分析
當兩個單片機用雙絞線連接好之后, 即可在兩臺計算機上同時運行程序。當程序運行一段時間后, 就可對運行結果進行分析。分析時, 可先對發送端進行分析, 圖2所示是其寄存器的測試值列表。
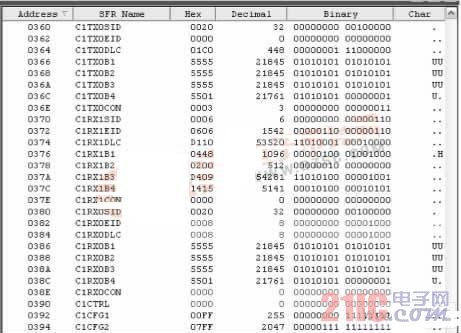
圖2 寄存器值列表
從圖2可知, 發送端的接收緩沖寄存器的值與發送緩沖寄存器的值相等, 說明發送端的CAN模塊在*到總線上有報文時也接收了報文, 這正好符合CAN總線協議。
利用圖3所示的測試變量值可從接收端進行分析。
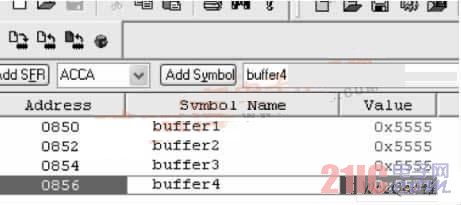
圖3 測試變量值列表
由圖3可知, 接收端變量的值與發送端賦予發送緩沖寄存器的值相等, 這也就是說, 接收端的接收緩沖器接收到了總線上的報文, 證明本CAN總線通信設計成功。
5 結束語
本文基于DSPIC30F4011的CAN總線特性, 通過在兩個DSPIC30F4011之間進行雙絞線連接, 實現了兩個單片機之間的CAN總線數據通信, 該方法具有實現簡單, 方便, 實時性好, 方便靈活等優點。可以為需要使用CAN總線通信的應用提供一個參考。